The Master Programme in Robotics and Advanced Construction is an innovative educational format that offers interdisciplinary skills and understanding through a series of class seminars that are put into practice through hands-on workshops. IAAC gives students the opportunity to create individual studio agendas and develop Pilot Thesis Projects based on the knowledge acquired during the seminars and workshops split into 3 Modules. In this way, IAAC puts together an experimental learning environment for the training of professionals with both theoretical and practical responses to the increasing complexity of the construction sector.

Multiagent brick wall
In recent years, there has been a growing interest in developing multiagent systems that combine the strengths of human, robotic, and virtual agents to perform complex tasks. In this project we theorize on how such a system could be implemented in bricklaying at a construction site, which traditionally relies heavily on human labor. With the … Read more
Demolition Treasure Hunt

Sorting for Salvageable Materials This course was mainly to understand automated collaborative multiagent systems in different environments. Term’s 3 topic (Human-Machine-Collaboration) is recognized through this course by exploring the possibilities of the processes and us being capable of mapping in different diagrams how we imagine a scenario with an automated procedure. For this task, we … Read more
Thermal Sensing for Advanced Cork Manufacturing
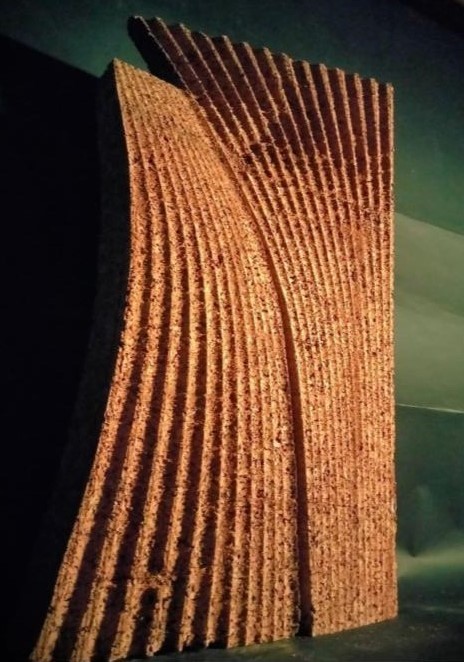
This research study delves into the realm of advanced robotics and semi-automated manufacturing processes that take into account the material properties of cork. Specifically, it explores the design and fabrication of a surface system that is optimized for both aesthetic appeal and functional performance. Building on the knowledge gained in a previous term on robotic … Read more
Spidey Sensor
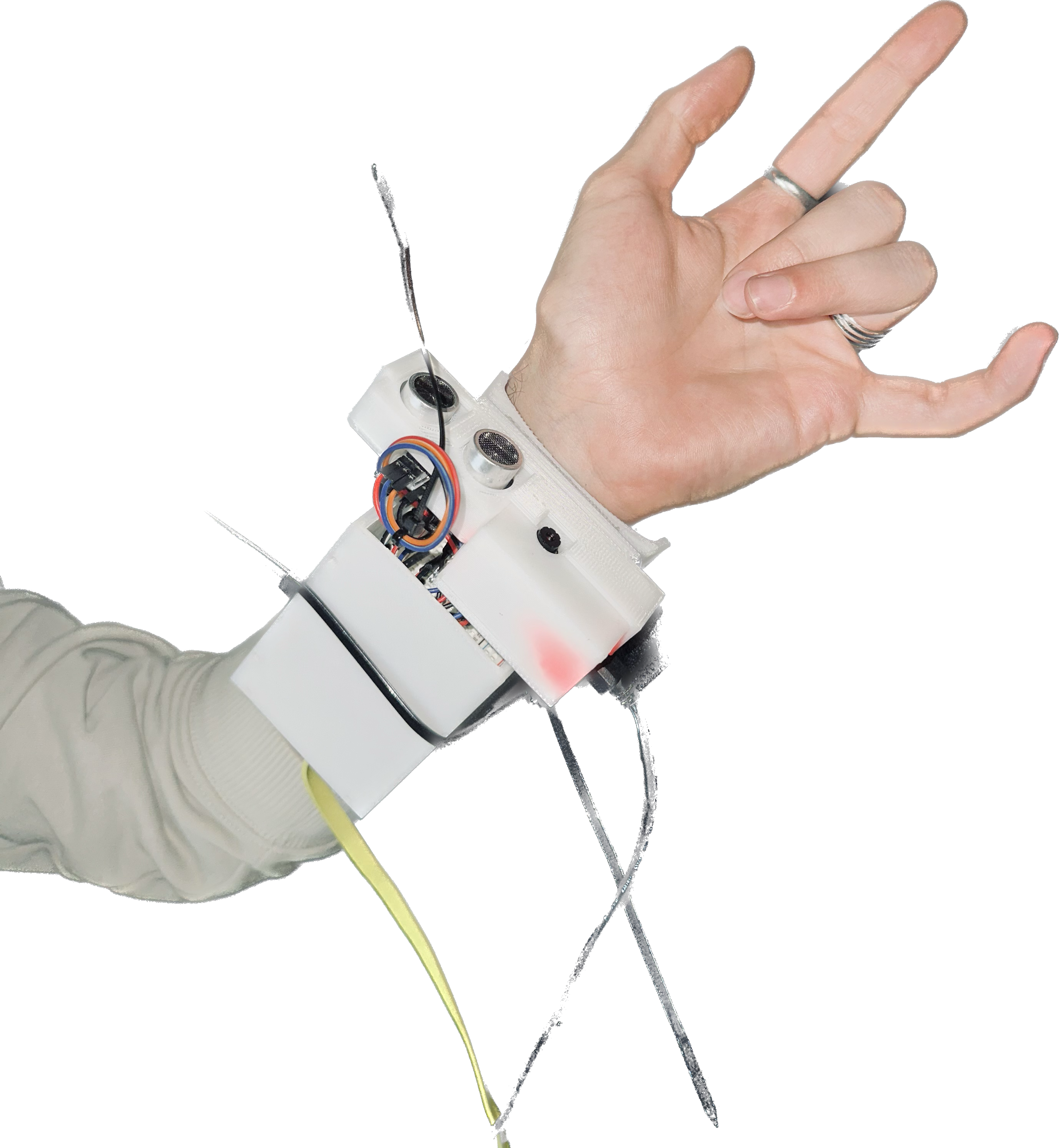
During this Hardware seminar, we were able to understand different types of sensors used in robotics and the techniques used to process the collected data. The aim of the seminar is to use the sensors to understand the environment and then expect the robot to take decisions (automation) and carry a specific task (actuation). For … Read more
Thermal Rhythm

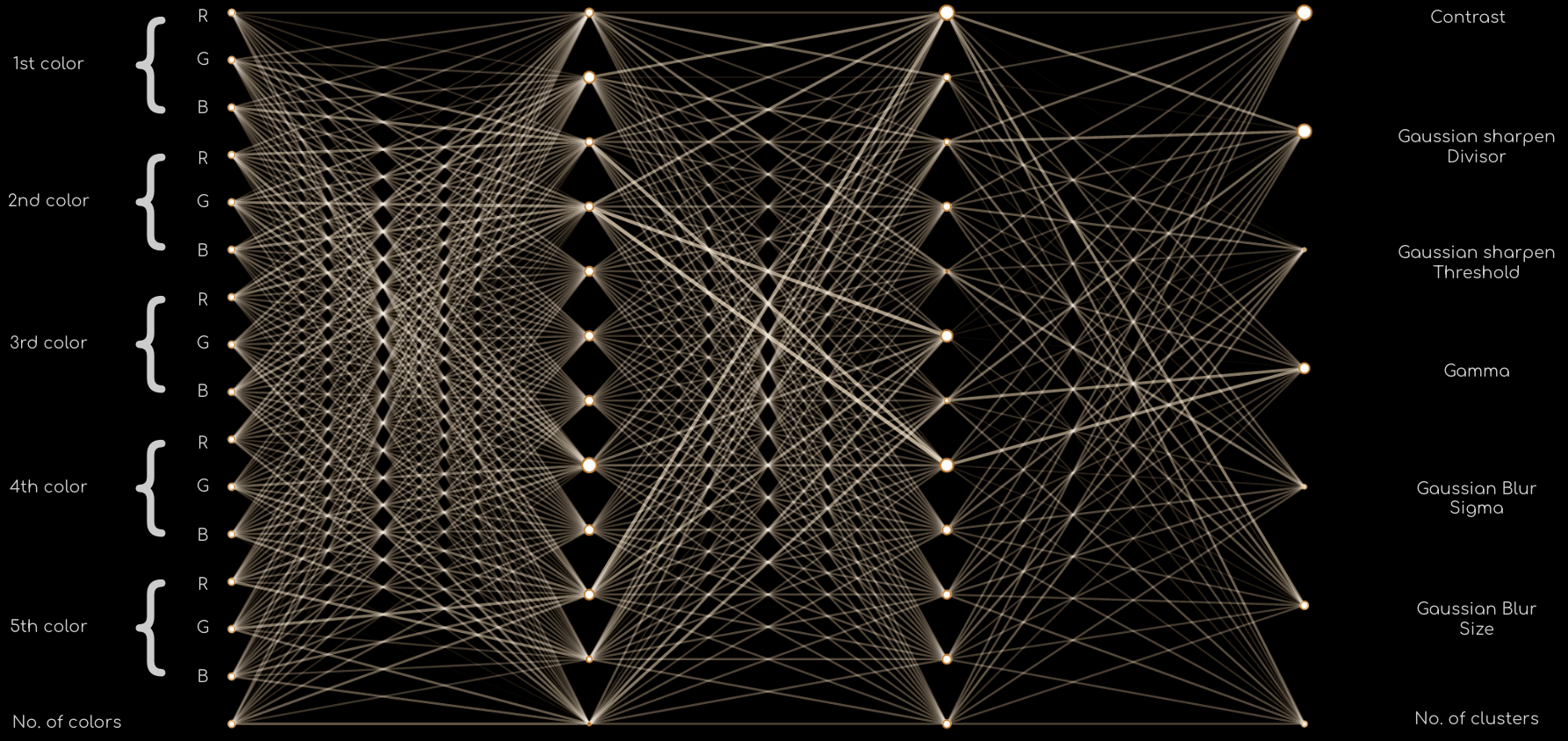
An interactive art installation that utilizes thermal imaging and real-time animation to create a captivating visual experience. The general aim of the project “Thermal Rhythm” was to generate an interactive art-wall in complete darkness which translates the human body movements into animations that controls or visualizes the emotions of the detected person through different colors … Read more
From Scans to Mesh: Exploring ROS and MoveIt
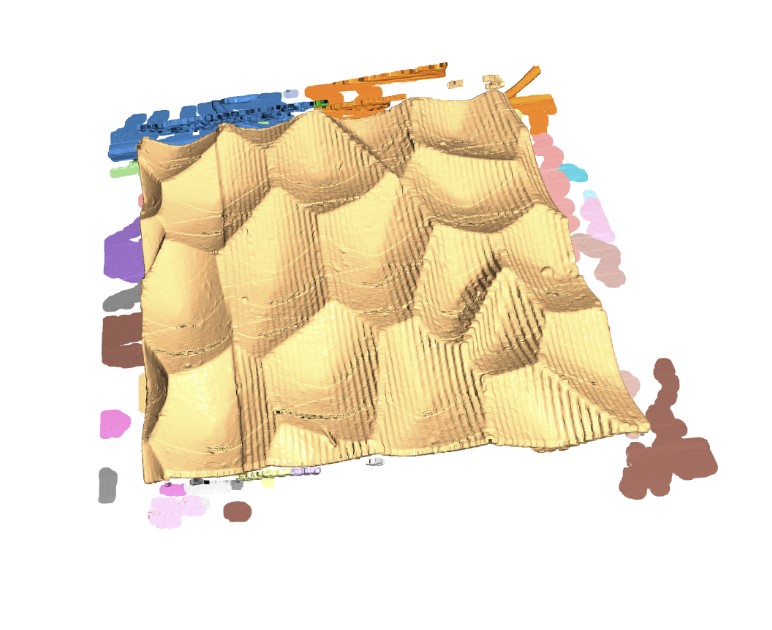
During the seminar, we explored the core concepts of ROS (Robotic Operating System), its vital tools, and the seamless integration of Python for interacting with robots. With this integration, we effortlessly processed sensor data and exercised control over the UR10e robot, which served as our platform for the seminar. Through practical exercises, we gained hands-on … Read more
ARUCO MARKER GUIDED AUTONOMOUS ROVERS
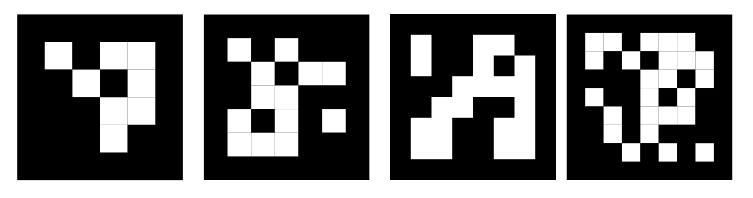
Aim Fiducial Markers Aruco fiducial markers were used for object detection and localization. Fiducial markers are black and white markers that can be detected and identified by computer vision algorithms, making them useful in a variety of applications. Here are some of the benefits of using Aruco fiducial markers: Localization & Mapping Workflow Node Graph … Read more
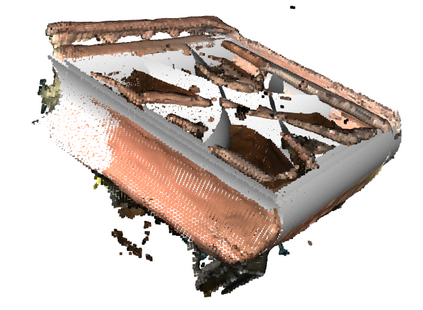
RTAOD

real-time autonomous object detection The project “RTAOD” in the workshop 2.1 was developed to navigate and localize a robot autonomously through room and create a map of the scanned area. In the meantime it collects data of detected objects and counts the quantity of them. Required tools This project got realized by the Software “ROS … Read more
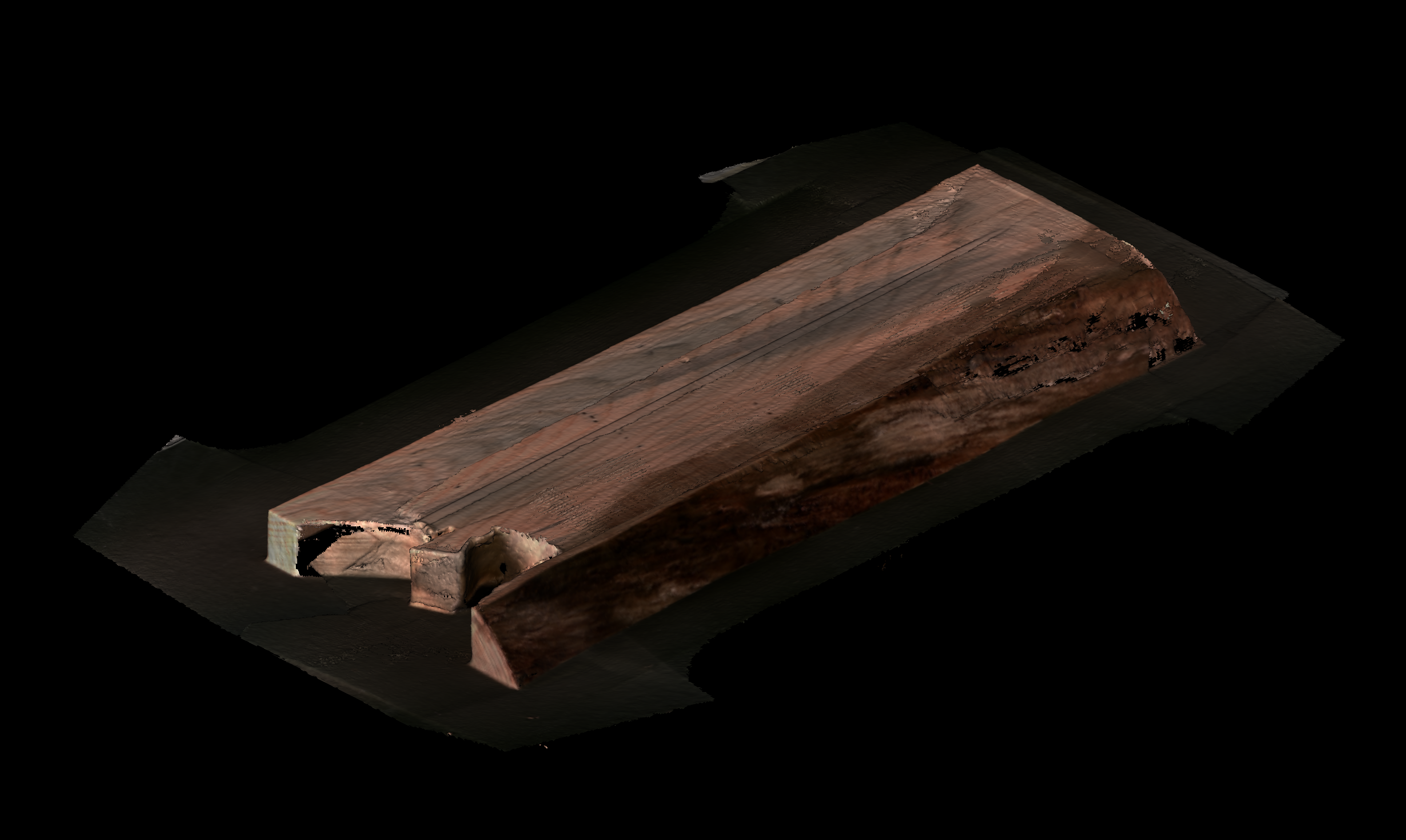
Scanning to compare clay bricks: Digital vs Real
In this course we learned about the Robotic Operating System (ROS) and the MoveIt motion planning using Python for controlling robots. We also utilized development tools such as Git and Docker for managing the data. We learned about different types of sensors which helped for the robot’s motion visualization and scanning for the purpose of … Read more