Robotic Scanning
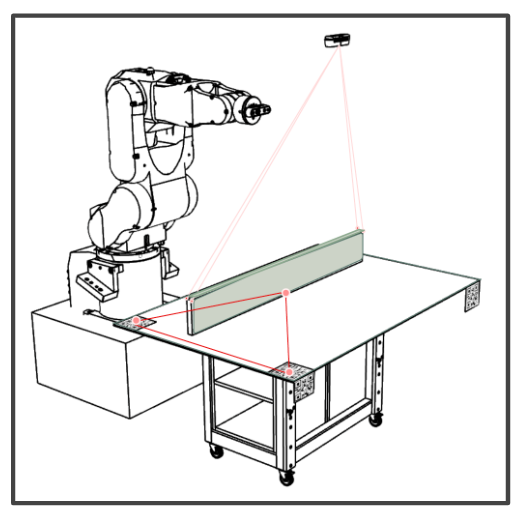
Objective of this research is to create a robotic scanning workflow that creates high definition meshes for use cases in design and fabrication. Tools Hardware and software used in this research are – UR RobotIntel Realsense D405MoveitIndustrial Reconstruction Initial Tests The initial tests were intended at understanding the parameters of the camera to obtain an … Read more