
Introduction
This project investigates the dialogue between human gesture and robotic motion through painting. Over three weeks, students study brush behavior, paint flow, and stroke dynamics, beginning manually and progressively translating gestures into robotic trajectories. The final outcome is an A2 robot-made painting, accompanied by a vectorial drawing and a 60-second video, reflecting the anatomy of the tool and exploring how the robot’s articulations shape its marks.
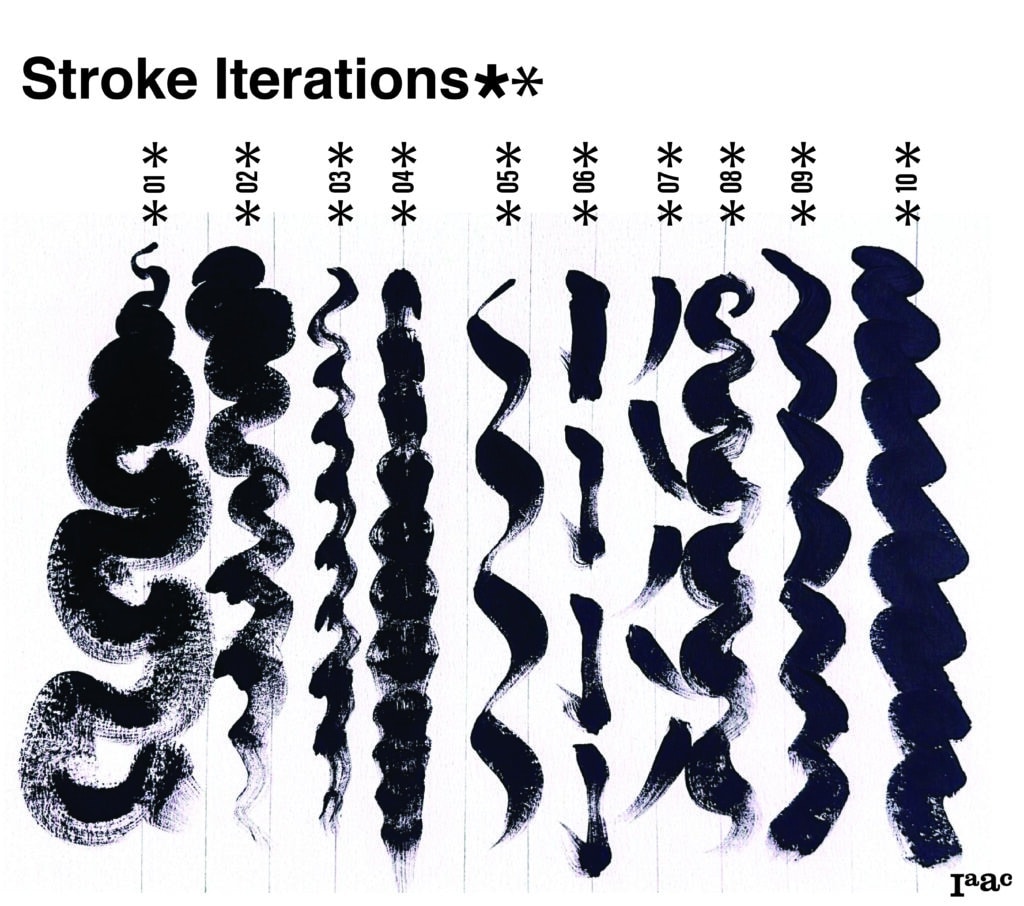
Step 01 – Manual Exploration
In the first stage, we focused on understanding the behavior of the brush and paint through direct manual experimentation. By varying stroke length, pressure, and speed, we observed how the bristles respond to different movements and how the paint distributes on paper. This hands-on exploration allowed us to map the relationship between gesture and mark-making and develop a vocabulary of strokes.
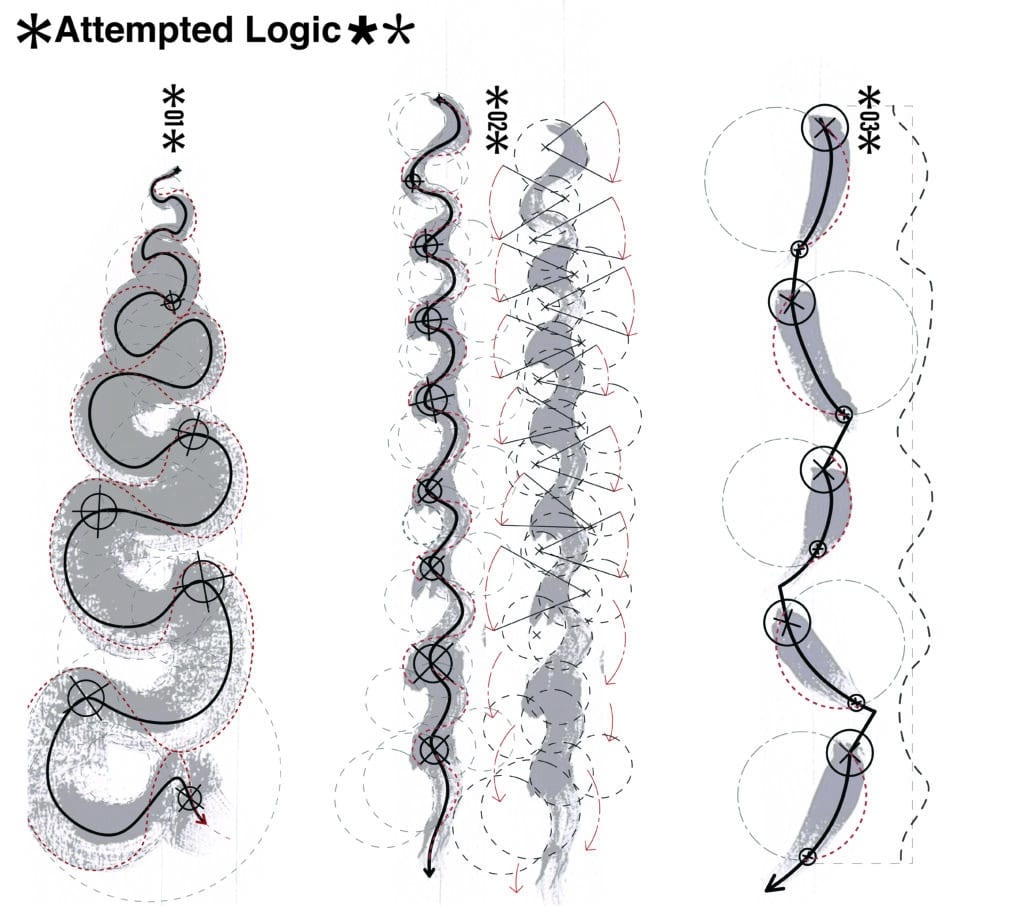
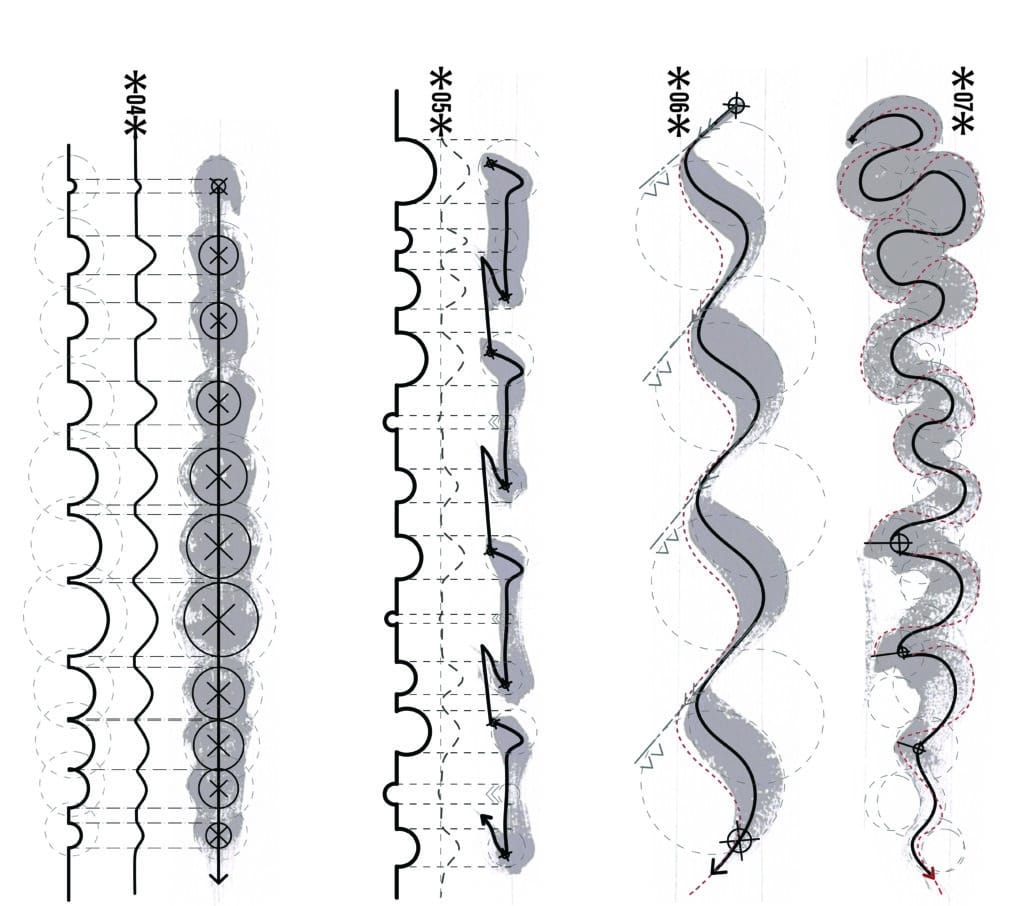
Attempted Logic for the manual test :
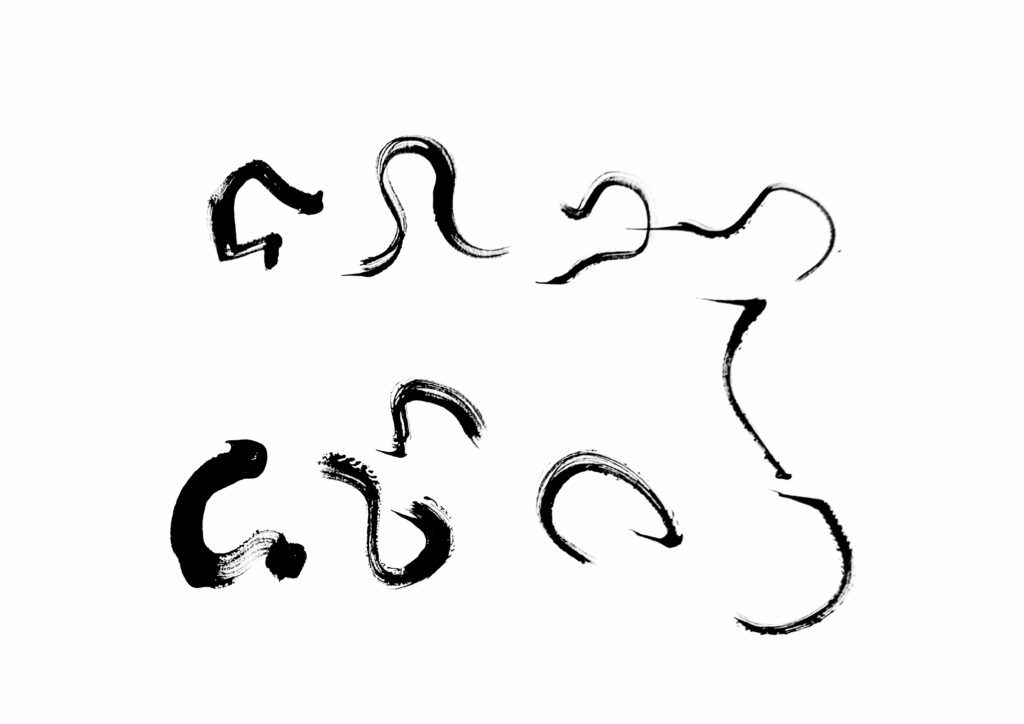
Step 02 – Robotic Testing
During the second stage, we transferred our findings from manual exploration into robotic trials. Using the robotic arm, we programmed simple trajectories to replicate the gestures practiced by hand. By adjusting stroke angle, speed, and dipping frequency, we explored how the robot interprets human-like movements and refined strategies within its mechanical constraints.
Step 03 – Final Implementation
In the final stage, the robotic arm executed the complete painting, incorporating all previous insights. The robot rotated along the stroke direction, mimicking the natural twist and dynamics of hand gestures. By coordinating rotation, reach, and articulation, we translated studied marks into a coherent composition, reflecting how the machine’s anatomy shapes its expressive potential.

Robotic Drawing 02 + Logic Drawing 01
