
Abstract
Construction is responsible for a substantial share of global material waste and carbon emissions, and one of the reasons is structural: design, fabrication, and assembly are still treated as separate phases with fragmented handoffs between them. This podcast episode explores what changes when those phases are linked into a single, feedback-driven workflow where parametric modelling, robotic fabrication, and augmented-reality-guided assembly operate as one continuous system. In conversation with Dr Sina Mostafavi, the episode looks at how hybrid intelligence, smart materials, and phygital design-build environments can support more adaptive, reversible, and materially efficient construction, and where the real bottlenecks, both technical and cultural, still sit.
Guest
Dr Sina Mostafavi is an architect and researcher, Associate Professor at Texas Tech University, and Director of the Hi-DARS Lab (Hybrid Intelligence Design and Augmented Robotic Systems). His work spans computational design, robotic fabrication, and the integration of digital workflows across design, production, and construction. He holds a Ph.D. from TU Delft, and his current research centres on how algorithmic design, material intelligence, and human–machine collaboration can work as a single architectural process.
Key Findings
From materialisation to integrated design-to-production
Sina’s work has gone through several phases over the past fifteen years. The early phase focused on design information modelling and performance-driven design, examining how geometry, data, and simulation inform architectural form. That interest gradually shifted towards materialisation and robotic production, organised around three recurring concepts: porosity, hybrids, and assembly.
More recently, the focus has moved again, this time towards integrated design-to-production systems where humans sit at the centre of the loop rather than at its edges. This is the premise of the Hi-DARS Lab, and it reframes the question the field has been asking. The problem is no longer how to automate fabrication, but how to keep design, production, and assembly actively informing each other.
Sina’s lab organises its work around three interconnected directions.
Phygital design-build mediums: workflows where digital and physical processes are tightly coupled, often through mixed reality, digital twins, and, more recently, embodied AI.
Hybrid human–robot collaboration: methods where humans and machines co-design and co-produce, rather than humans programming and machines executing. The intention is adaptive, situated construction rather than pure automation.
Hybrid circular material systems: rethinking conventional materials (timber, concrete) and waste streams through material systems that are designed from the start for a specific robotic or additive manufacturing workflow, rather than adapted to it after the fact.
Smart materials and smart prototyping
A useful framing that emerged in the conversation, developed in Sina’s chapters in the Routledge Companion to Smart Design Thinking, is the distinction between smart materials and smart prototyping.
In conventional workflows, materials are treated as passive and fabrication is about executing predefined geometry. Smart materials invert this: intelligence is embedded in the material system itself through computed porosity and hybridity, so that structural, environmental, and functional performance are designed together across scales.
Smart prototyping, in turn, challenges the idea that prototyping is a validation step. It becomes a site of inquiry, and in Sina’s framing it unfolds across three modalities: digital prototyping (data-driven mass customisation), phygital prototyping (mixed-reality-connected design and assembly), and collaborative prototyping (hybrid intelligence and co-production with humans and machines).
AR as an n-dimensional, 1:1 operative environment
One of the more interesting reframings in the conversation was about what augmented reality actually does for architecture. It does not replace drawings or models; those remain important representational media. What it adds is dimensionality.
Beyond three-dimensional geometry, an AR or digital-twin environment can carry layers of information about assembly sequence, timing, safety factors, environmental data, and even social or participatory input. The working environment becomes, as Sina put it, n-dimensional. And because the model is overlaid onto the physical space at a 1:1 scale, the construction site itself becomes something architects can “work within” rather than only translate into.
There is also a democratising dimension here. The ability to hold a bird’s-eye view and a detailed view simultaneously is something architects take for granted but that is not intuitive for the general public. AR environments make that cognitive move accessible to non-experts, which opens the door to participatory design and community co-production.
A pipeline, reconstructed
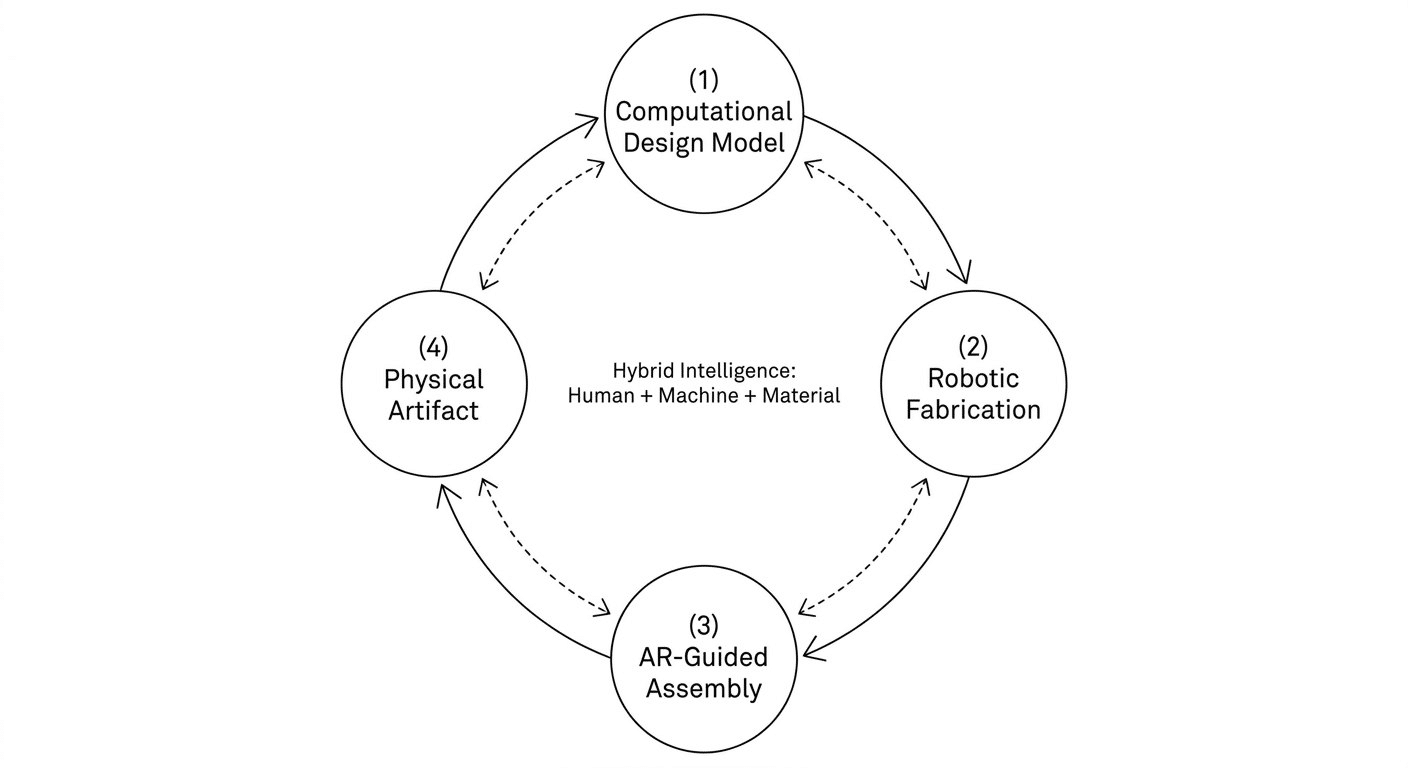
The conversation didn’t produce a single clean pipeline walk-through, but the components of one were described across the episode. Reassembled, a Hi-DARS-style workflow looks roughly like this.
A computational design model is informed by performance criteria, whether structural, environmental, or material. It is linked to simulation environments where both data-driven feedback and human judgement shape the design. From there, toolpaths and fabrication logic move to robotic production, but remain open to adjustment. During assembly, AR overlays the digital model onto the physical site, allowing real-time guidance, situated decision-making, and continuous feedback. The physical outcome, the built artefact, in turn informs the digital model, closing the loop.
Part of the intelligence in this pipeline is carried by the material system itself, through joinery logic or geometric behaviour, which reduces the need for centralised control. The assembler becomes an active participant in the loop rather than a passive executor of instructions.
The bottlenecks are cultural as much as technical
When asked about gaps in current frameworks, Sina separated the problem into two lenses.
On the technical side, most robotic production workflows are still built around offline, simulation-driven environments that work well in controlled conditions but struggle with the adaptive, interactive context of human–robot collaboration. Closing that gap depends on work in embodied AI, reinforcement learning, and, increasingly, imitation learning, where robotic systems learn from human demonstration. Vision and force-driven feedback are part of the same shift: when a robot can see and feel, it begins to meet the human halfway on the subtle, situated judgement that assembly requires.
On the societal and disciplinary side, the bottleneck is pedagogy and expertise. These workflows require knowledge that sits between architecture, computation, robotics, and data science, and that combination is still poorly integrated into architectural education. There is also a broader cultural adoption problem: like any emerging technology, these workflows face a chicken-and-egg dynamic between demand, investment, and maturity. Sina drew an analogy to concrete, a material that also needed courageous early adopters before it became part of the standard toolkit.
Meeting robots in the middle
A recurring theme in the conversation was a shift in how the relationship between humans and machines is framed. Rather than robots replacing humans or humans supervising robots, Sina described a “sweet spot in the middle”: humans moving towards the robot by adapting their workflows, robots moving towards the human by gaining vision, force feedback, and situated learning.
He also pointed out that this isn’t as futuristic as it sounds. Every time a human picks up a tool, including, he noted, a phone, they are already extending themselves through a machine. The question for architecture is what kind of extension we want to design for, and how much agency we leave to the human, the machine, the material, and the environment.
From experiment to scale
On the question of scaling beyond experimental projects, the conversation opened up in two directions.
The first is distributed production. Rather than replacing centralised industrial construction, augmented robotic workflows may find traction in localised, adaptable fabrication ecosystems, informed by maker and DIY culture, but extended through advanced robotics and AR-guided assembly. The implication is that the “kit of parts plus AR app” model, where a non-expert can assemble a component without knowing how to code or operate a robot, is a plausible path rather than a speculative one.
The second is commercialisation. Sina mentioned that the Hi-DARS Lab has filed patents on lattice systems that are self-balancing, with no glue, no adhesives, no screws, using milling patterns that embed the assembly logic into the geometry itself. This is an interesting path because it suggests that the route from research to industry doesn’t have to go exclusively through high-impact publications; a patent plus a clear technology readiness level can do similar work, especially for lightweight structural systems with a strong carbon-footprint argument.
Neither path replaces the other, and both depend on a cultural infrastructure (new pedagogies, new professional frameworks, and public familiarity) that is still being built.
Intended vs. Actual Questions
Prepared Questions
- Ice-breaker: How has your work in computational design and robotic fabrication evolved, and what are you focusing on now?
- How do you define robotic fabrication and augmented production and assembly in your own research context?
- In what ways do these workflows challenge or extend conventional digital fabrication practices?
- How does augmented reality reconfigure the relationship between model, drawing, and on-site decision-making during assembly?
- What gaps or limitations in current computational frameworks hinder seamless integration of robotic fabrication and augmented production? What are the bottlenecks?
- Could you give an example of a pipeline that illustrates how augmented systems work in practice, in your lab?
- From both academic and industry perspectives, how do you envision the future for augmented robotic production workflows, and how do we move beyond experimental projects towards construction at scale?
Actual questions I ended up asking
- You’ve spent much of your career pushing computational design and robotic fabrication forward in architecture. How has that work evolved for you lately, and what are you focusing on right now?
- How would you define robotic fabrication and augmented production and assembly in your own research context more specifically?
- How do these workflows challenge or extend conventional digital fabrication practices?
- So machines and materials also receive some intelligence and become active participants, they have agency? (unscripted follow-up)
- How does augmented reality reconfigure or change the relationship between model, drawing, and on-site decision-making during assembly?
- What gaps or limitations in current computational frameworks hinder seamless integration of robotic fabrication and augmented production, and what are the bottlenecks?
- Could you give an example of a pipeline that illustrates how this works in practice in your lab?
- How and when might this move beyond experimental projects and contribute to adaptive and resilient construction at scale?
- The lattice-structures research and patenting is fascinating; could this become a general-public product assembled through an AR app? (unscripted)
Reflection
A few things surprised me in how the conversation actually played out. Sina often answered the “what” and “why” questions through historical framing, such as the industrial revolutions, the invention of concrete, or the 200-year horizon of urban density, rather than through direct definition. That made the episode more discursive than the script anticipated, but it also produced moments the script would not have: the cyborg framing of human-tool relationships, the concrete analogy for cultural adoption, the lattice-patent story as an unexpected bridge between research and industry, and the closing exchange about AR-assembled kits for non-experts.
If I were doing this again, I’d leave more room in the script for exactly these kinds of digressions, and worry less about covering every prepared question. The pipeline example in particular would have benefited from a follow-up prompt, something concrete like “walk me through a specific project”, to pull the answer out of abstraction.
Overall, this was an incredible experience and invaluable knowledge exchange. Stay tuned to listen to the full podcast that will be published soon.
Further Reading
Hi-DARS Lab: hi-dars.org
Sina Mostafavi, Hybrid Intelligence in Architectural Robotic Materialisation. PhD thesis, available open-access through TU Delft’s A+BE journal.
Routledge Companion to Smart Design Thinking, chapters on smart materials and smart prototyping.
