ABSTRACT
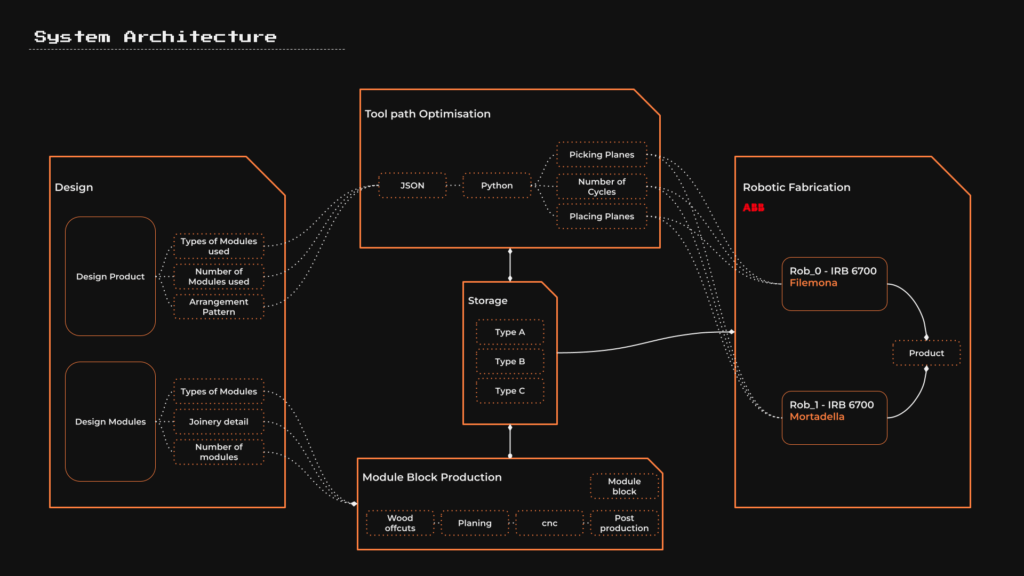
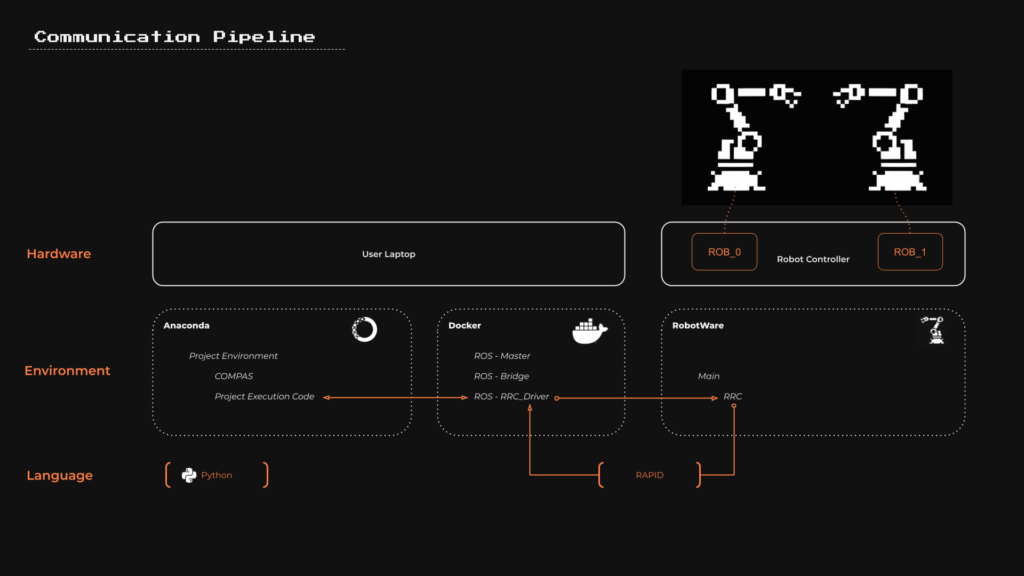
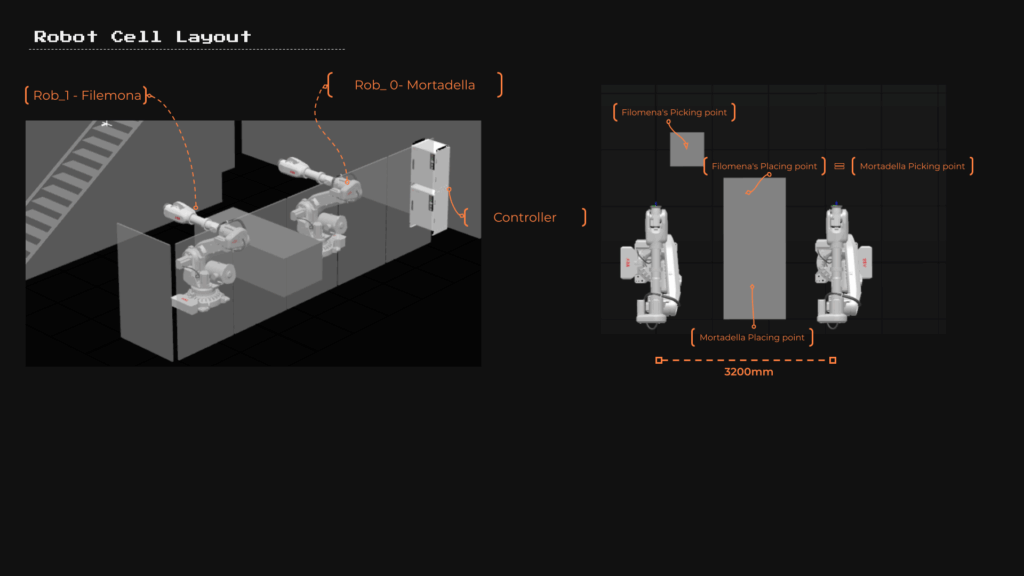
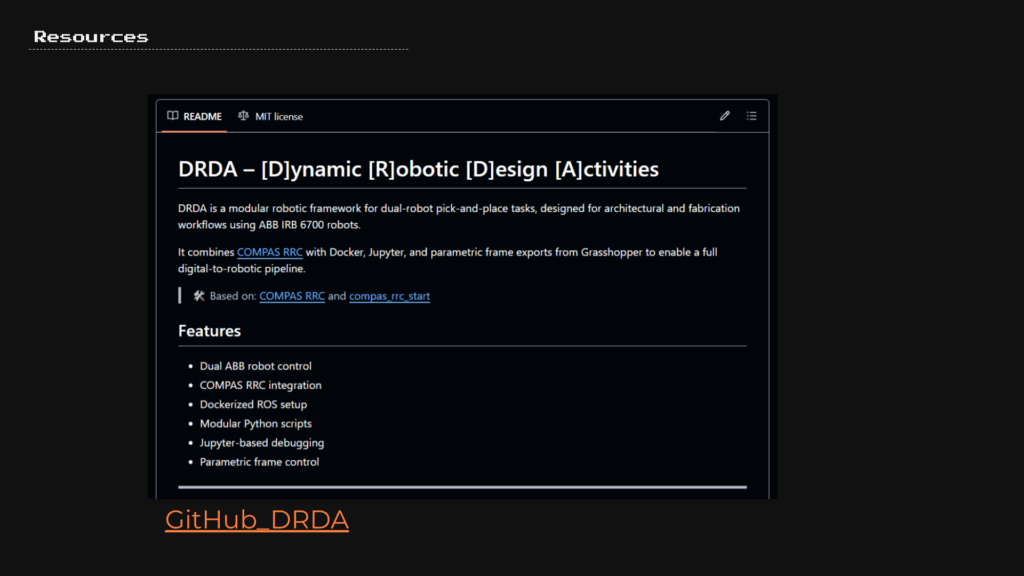
Autonomous parametric furniture assembly using modular blocks and ROS-driven industrial robots promises to revolutionize on-demand manufacturing. In this work, we introduce DRDA (Dynamic Robotic Design Activities), a unified framework that seamlessly links customer-driven design to autonomous multi-robot execution. A user-defined geometry and style, which our custom block-selection and toolpath-generation engine converts into collision-free pick-and-place trajectories for ABB IRB 6700 manipulators via COMPAS_RRC.
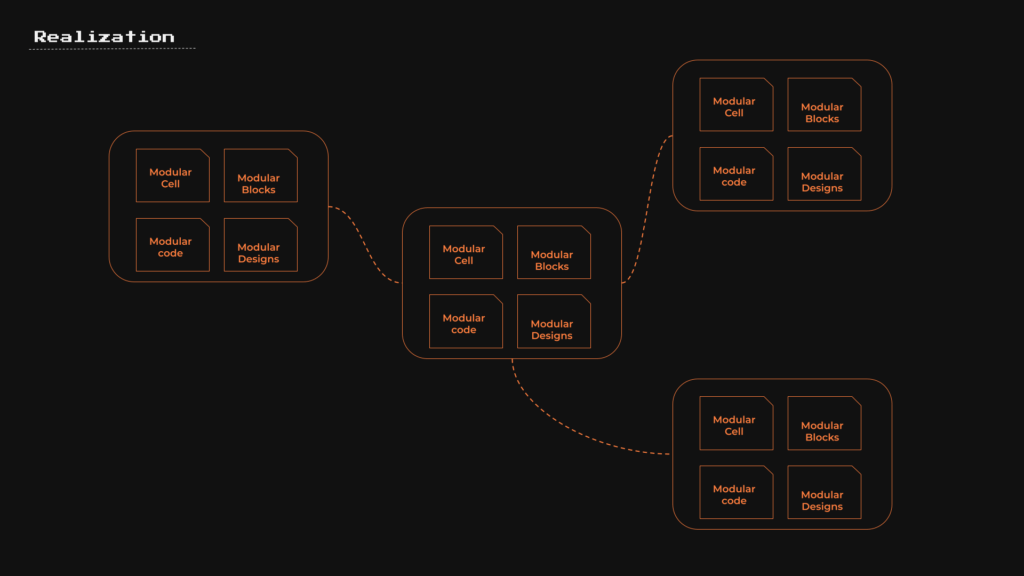
Flexible catalog data models encode block geometry and connectivity, while optimized speed-zone blending and coordinated task allocation maximize throughput. We ask whether this end-to-end parametric pipeline can reliably assemble furniture with sub-millimeter precision, achieve pick success above 95 %, and sustain cycle times under 80 seconds in a coordinated multi-robot cell.
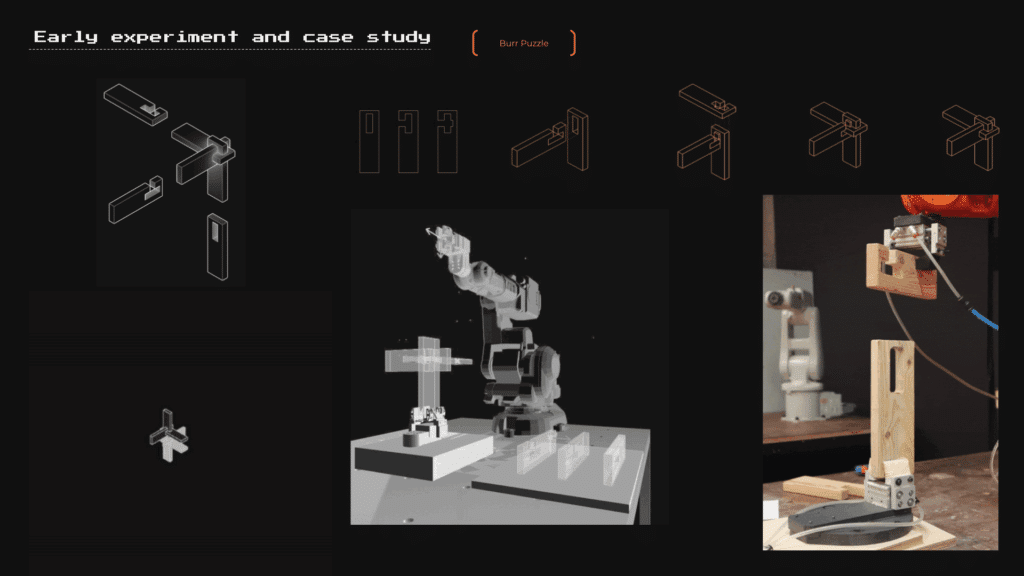
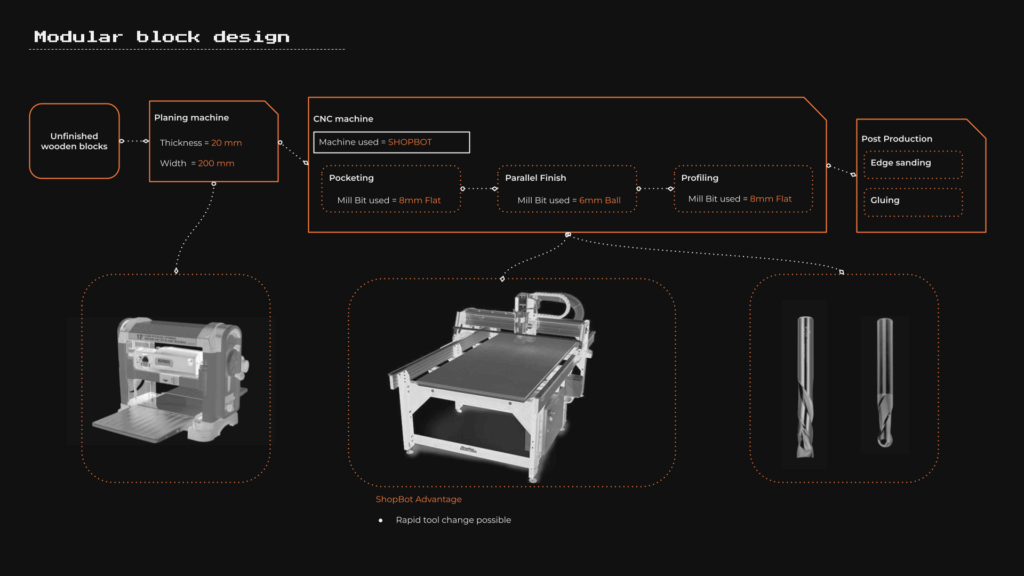
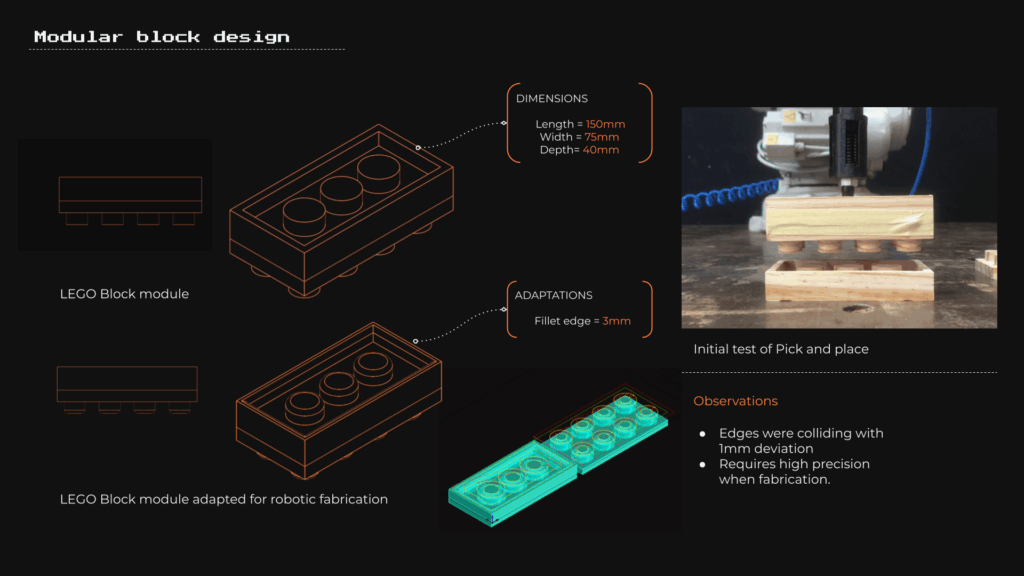
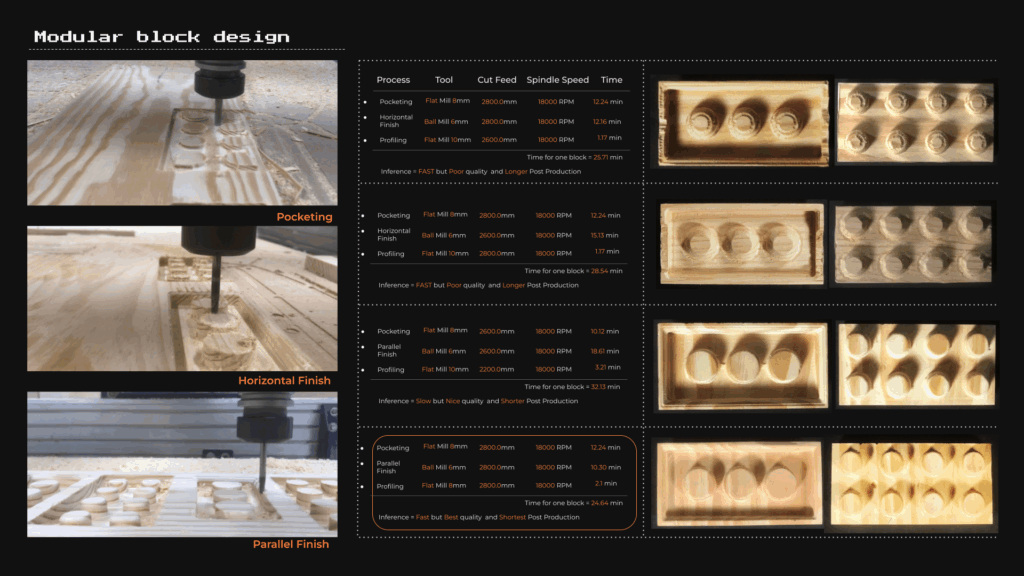
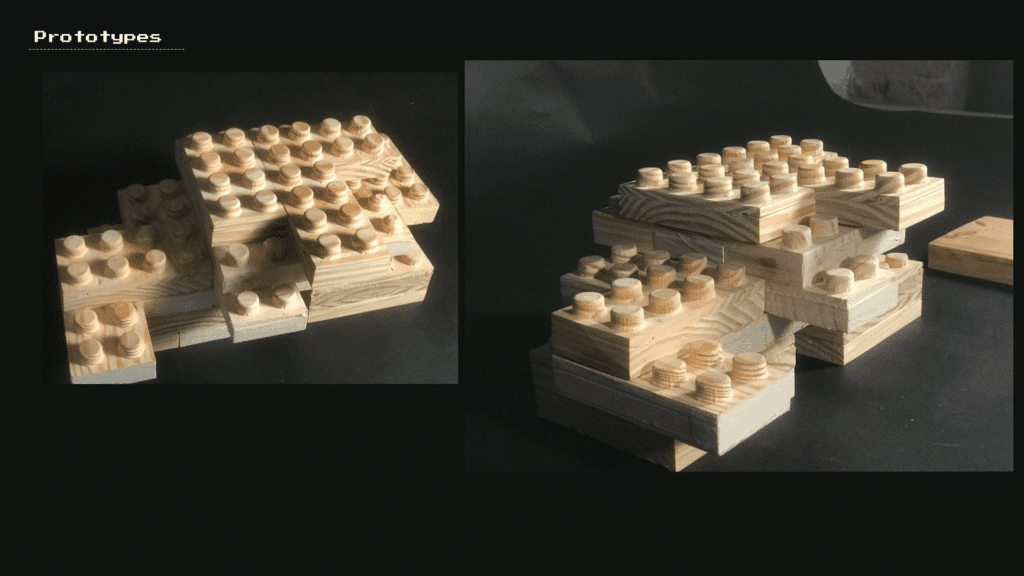
To validate our hypothesis, we conduct a case study on benchmark assemblies—executed on an ABB IRB 6700 testbed using LEGO-style wooden blocks—logging pick success, placement accuracy, cycle time, and the gains afforded by two-robot coordination.