
Aim
To explore innovative parametric tiling designs through the utilization of robotic tiling setups. The project aim is to utilize the functions of COMPAS framework and its extensions for robotic planning. Also, to incorporate computer vision and scanning information into the tiling process to enhance precision and efficiency.
Design Logic
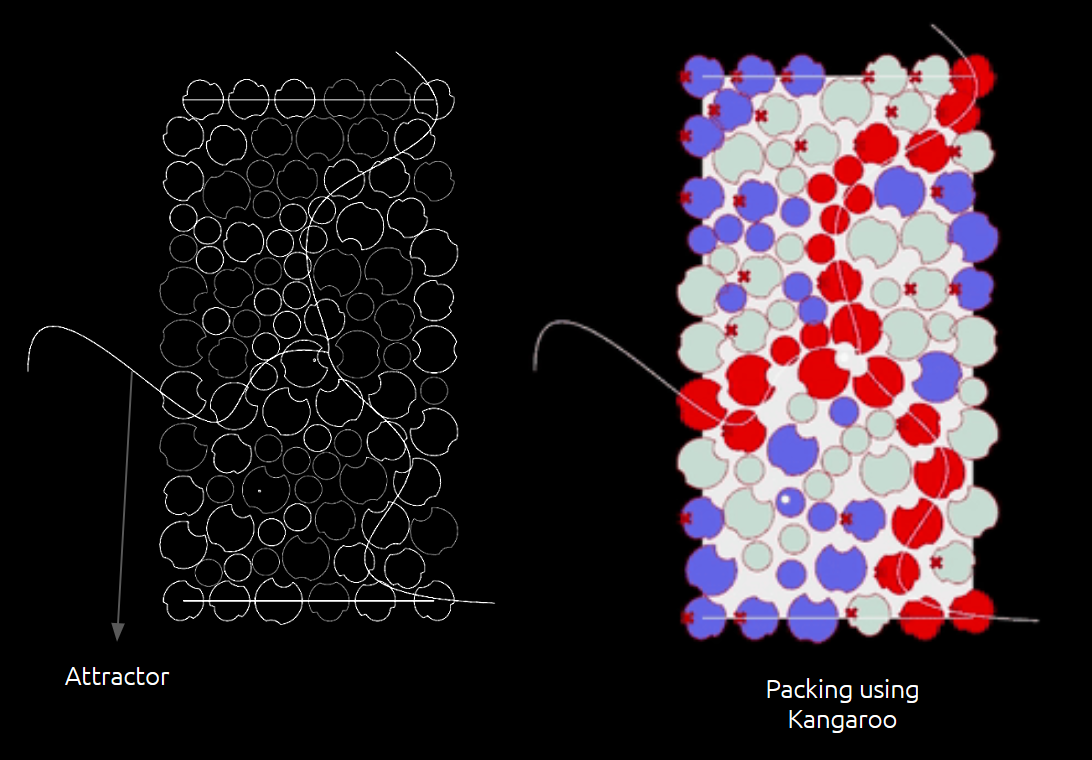
Inspired by the idea of unique artistic shapes, we crafted elegant pieces together using 3 different sizes and shape types, and 3 different colours, this caused 9 different iterations of design. With this unique plethora of designs, we could go forth with more creative freedom in nesting.
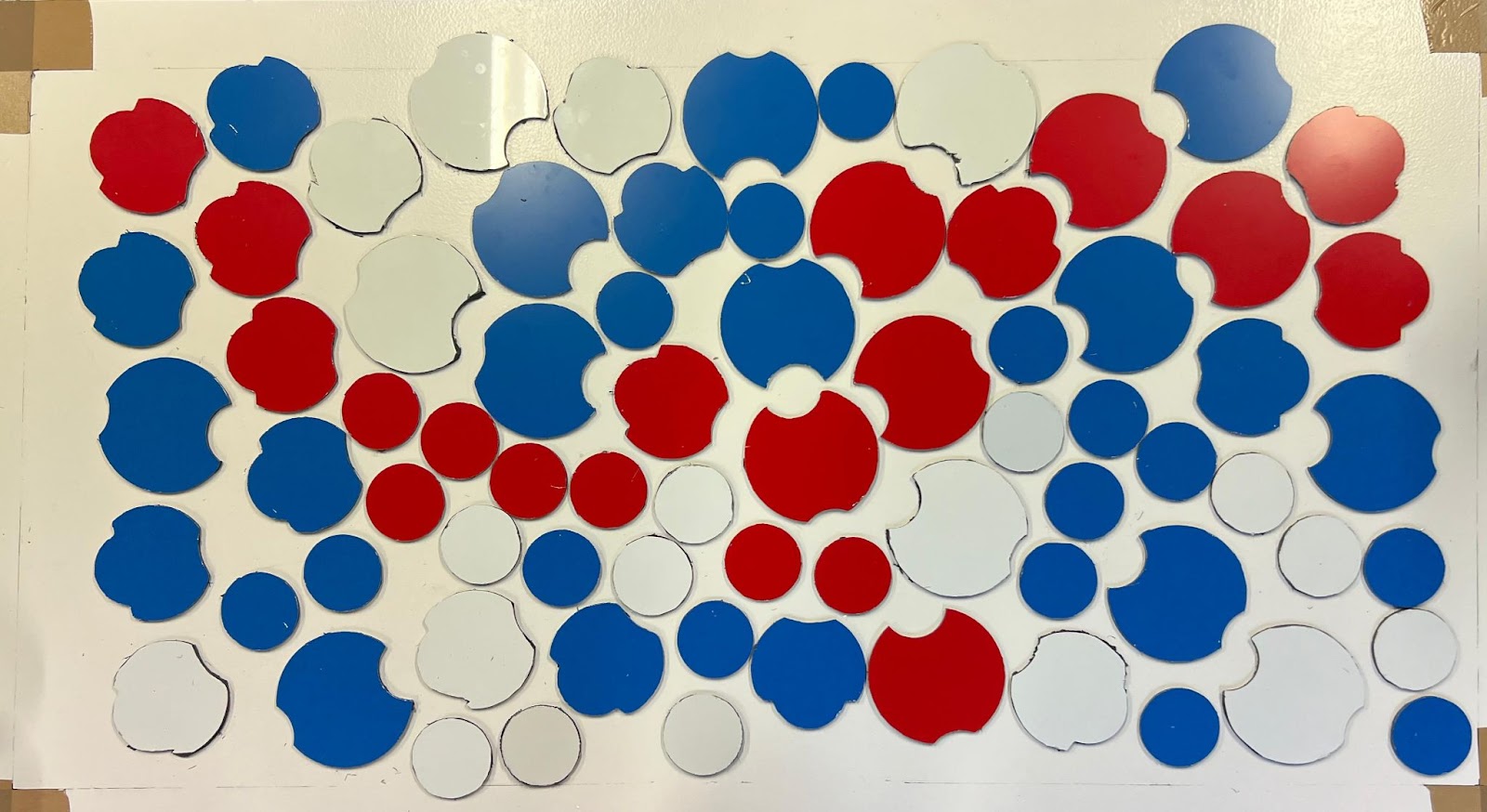
Manual Packing
Computational Workflow
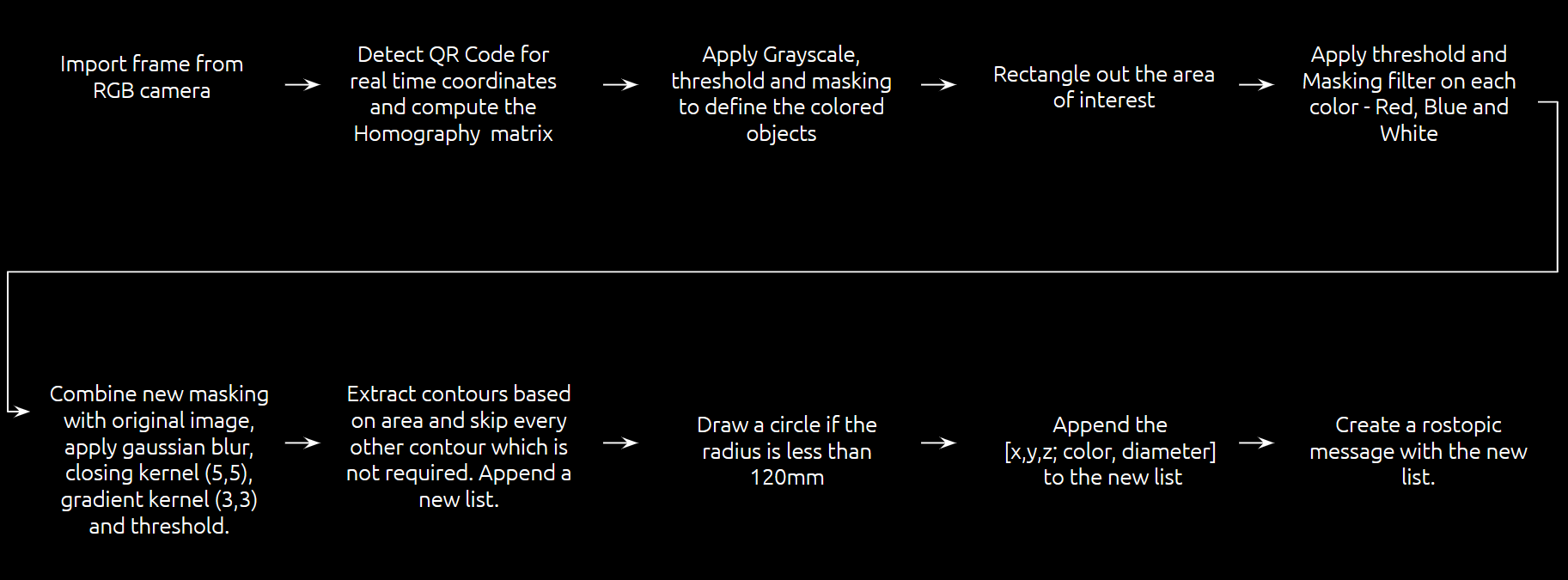
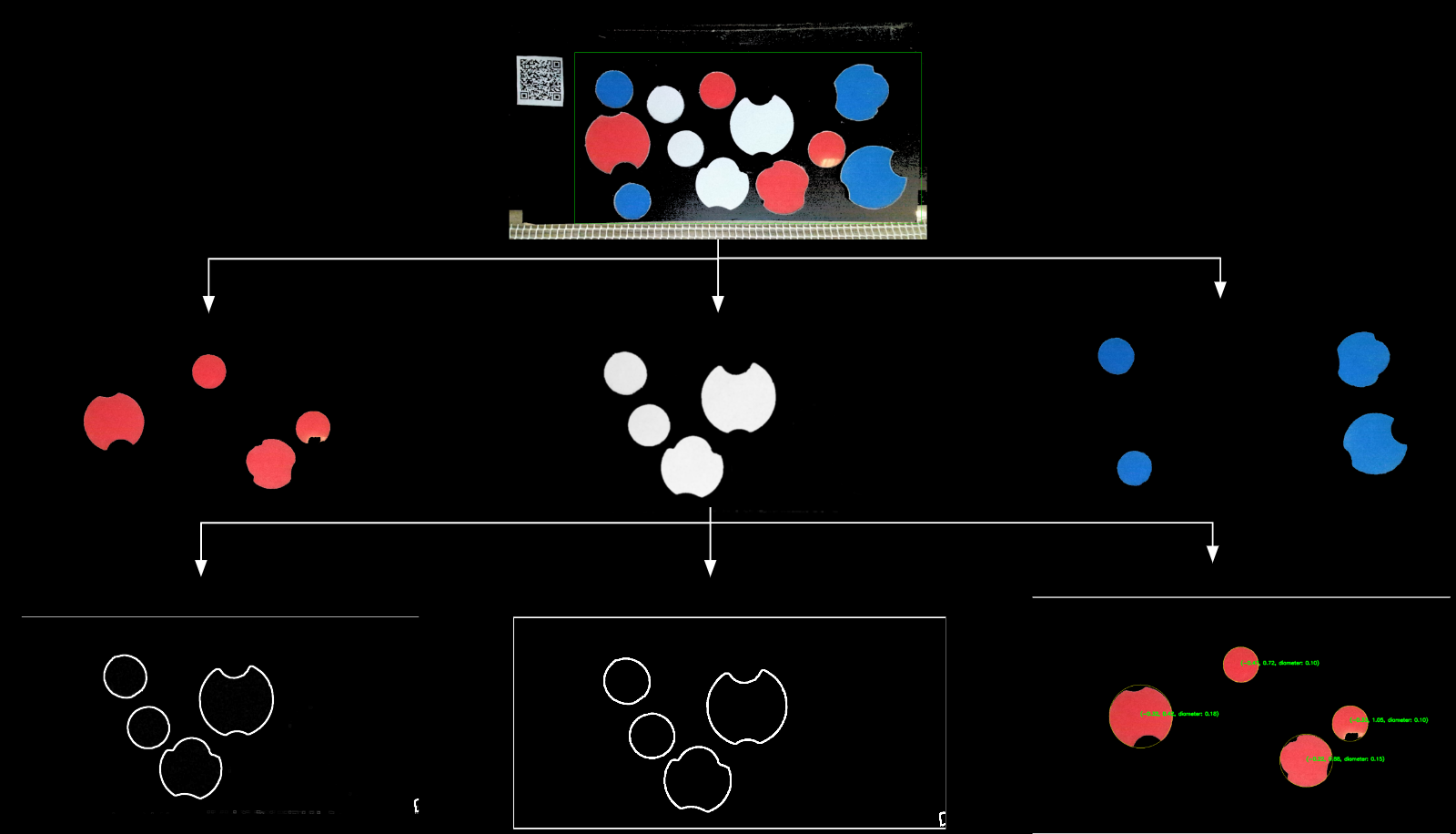
Filter Steps
When scanning tiles, we can split them out with colour filters. Red, White and Blue. We then apply filters such as gaussian, closing and gradient. We then calculate area and write all the data to csv; [x, y, z, colour, diameter, area]. We then send this across on a ROS topic to grasshopper from python.
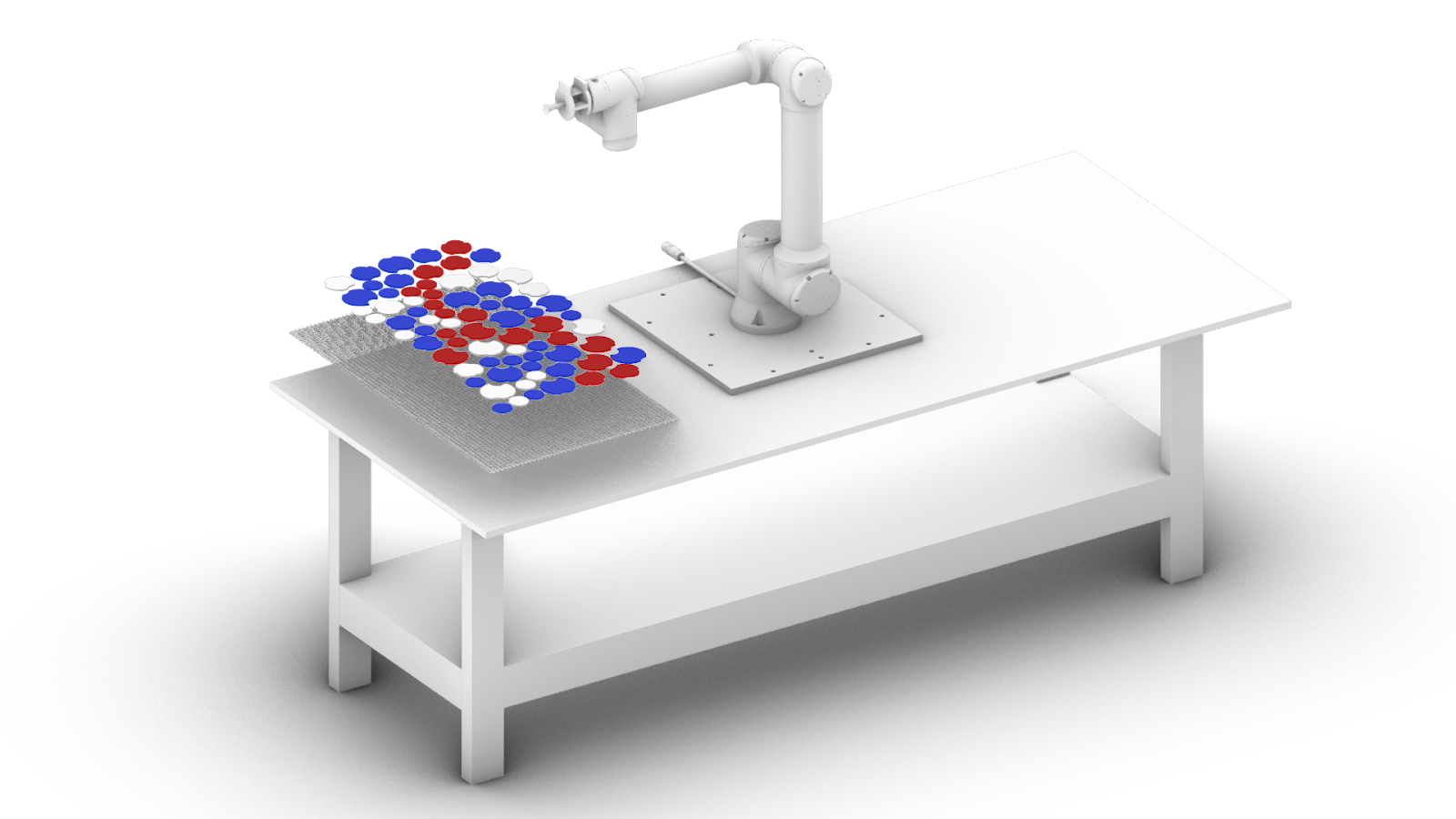
Fabrication Workflow
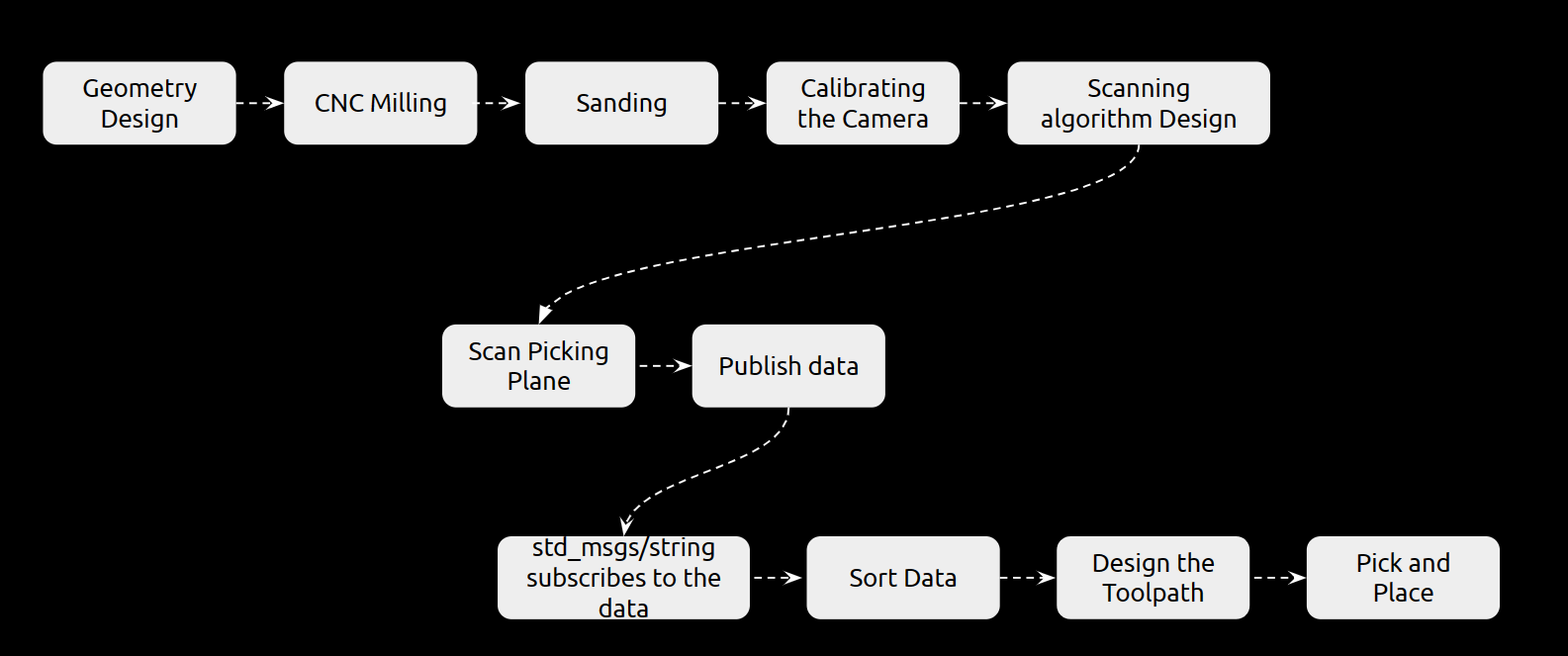
Fabrication Setup
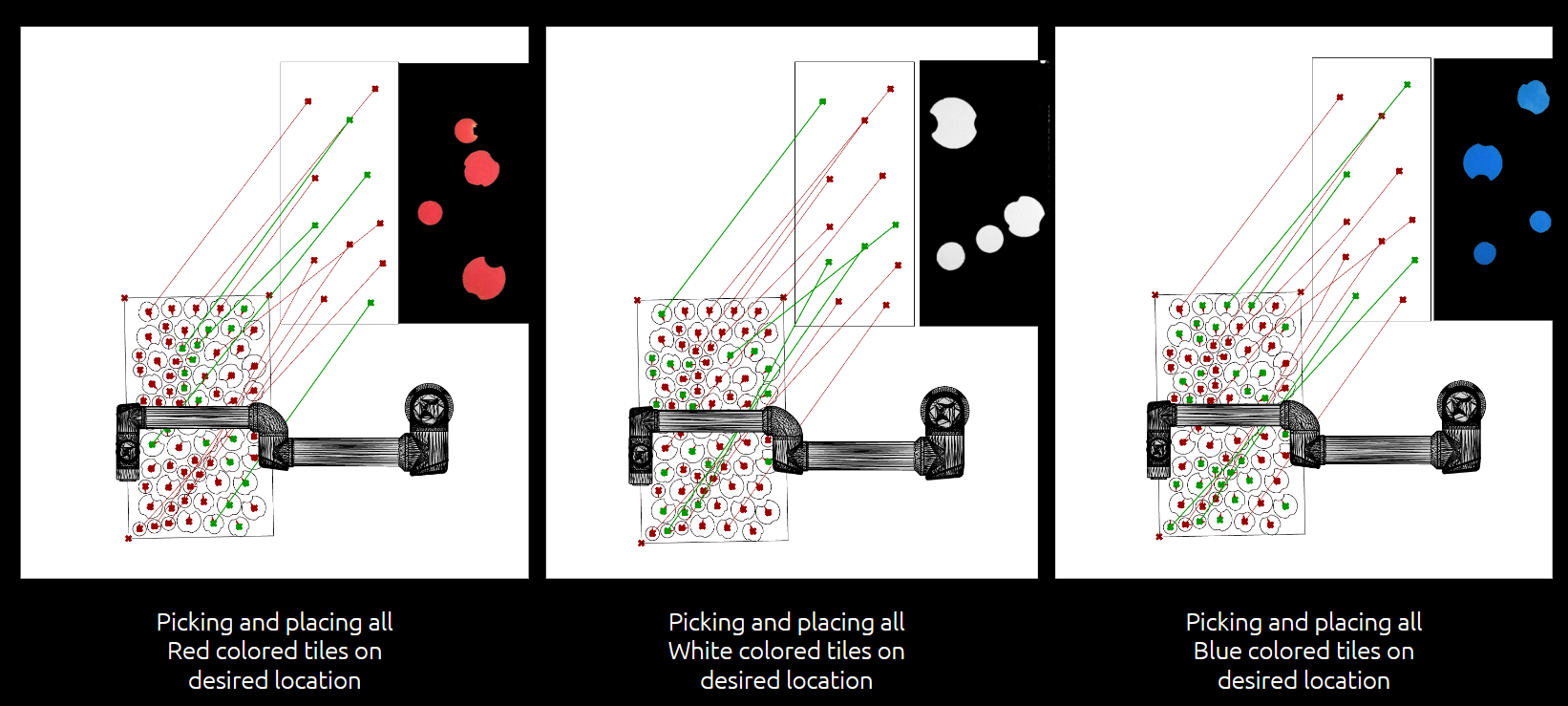
Fabrication Sorting
After sorting we we we adjust the picking patterns. We coordinate it by doing one colour at a time and placing each to fit the design from a fixed orientation.
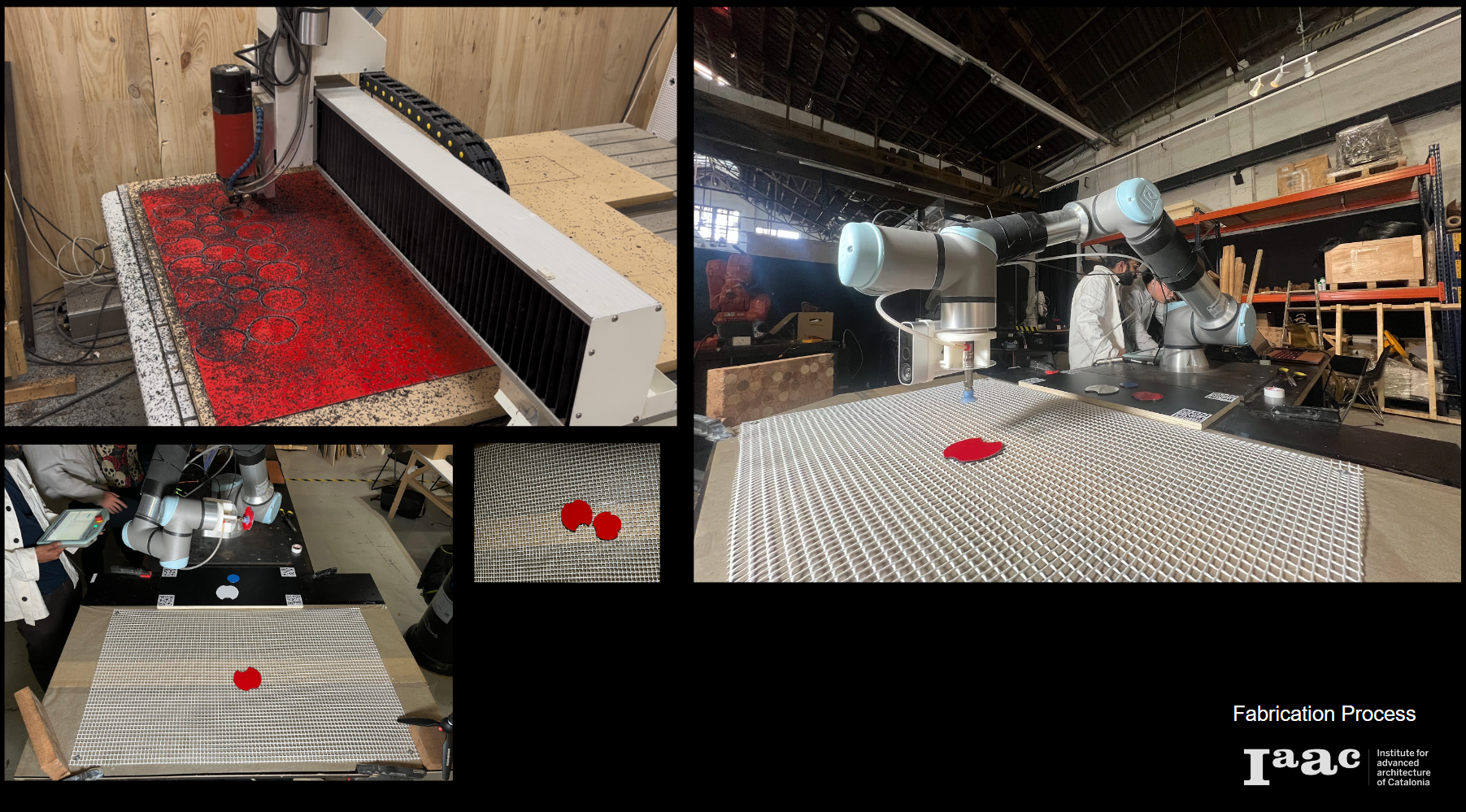
Fabrication Process
Performance
References:
- Aikaterini Toumpetski, Nikolaos Maslarinos. Non-planar Upcycled Robotic Tiling. ETH Zürich, MAS 2021/22 Thesis Project, October, 2022. https://www.masdfab.arch.ethz.ch/2021-22-t3-work
- Tom van Mele, et al., COMPAS: A framework for computational research in architecture and structures, http://compas.dev (2017-2024). doi:10.5281/zenodo.2594510. URL https://doi.org/10.5281/zenodo.2594510
- Gonzalo Casas et al., COMPAS FAB: Robotic fabrication package for the compas framework, https://github.com/compas-dev/compas fab, Gramazio Kohler Research, ETH Zurich (2018-2023). doi:10.5281/zenodo.3469478. URL https://doi.org/10.5281/zenodo.3469478
- Angel Muñoz, Alexandre Dubor. Workshop 2.1: Mosaic // Sharp edge. IAAC Blog. February, 2021. https://www.iaacblog.com/programs/workshop-2-1-mosaic-sharp-edge
- Gramazio Kohler Research. Mobile Robotic Tiling. Gramazio Kohler Research (2016). https://gramaziokohler.arch.ethz.ch/web/e/forschung/257.html
