Manufacturing as a Service – A Conversation with Valentino Tagliaboschi
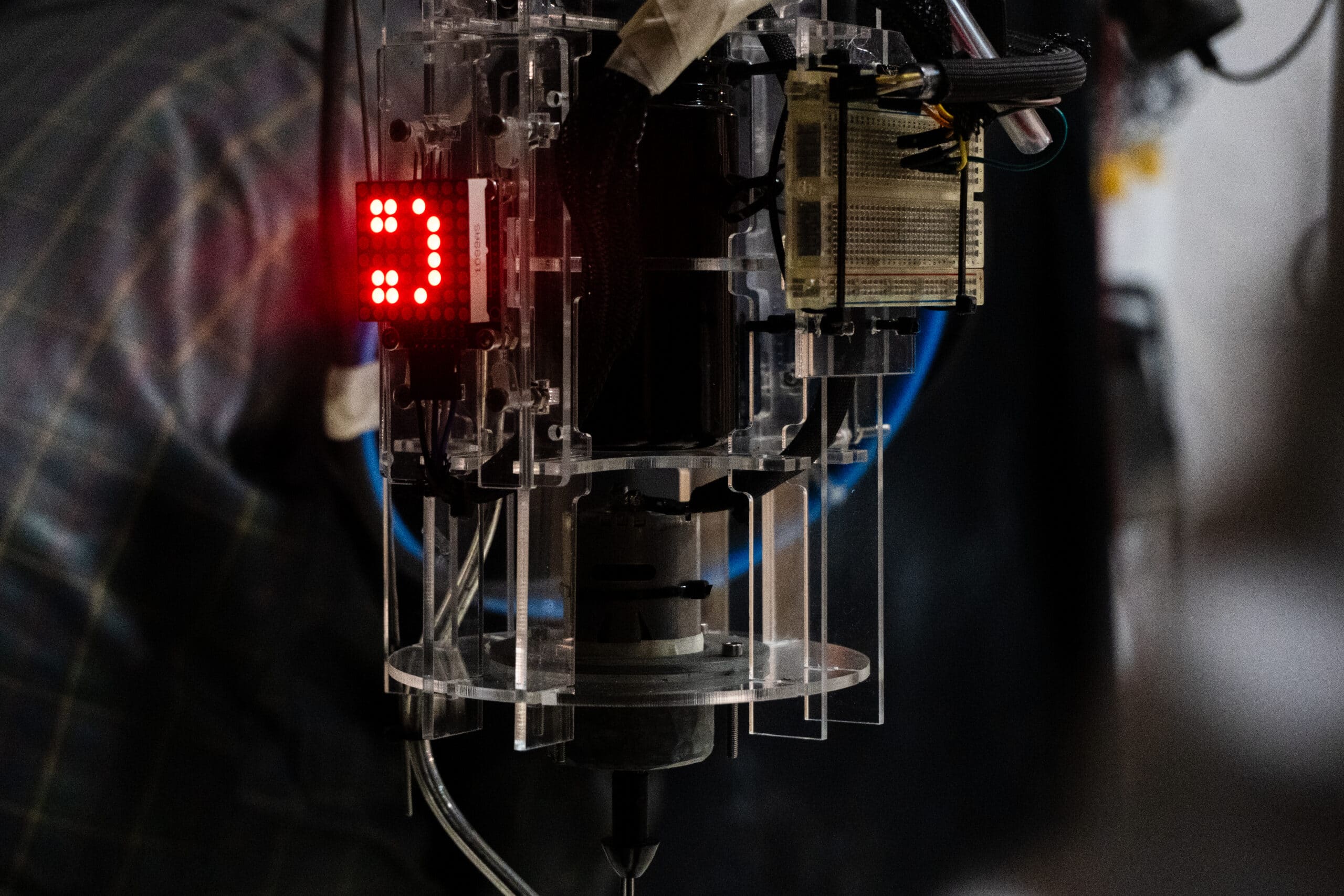
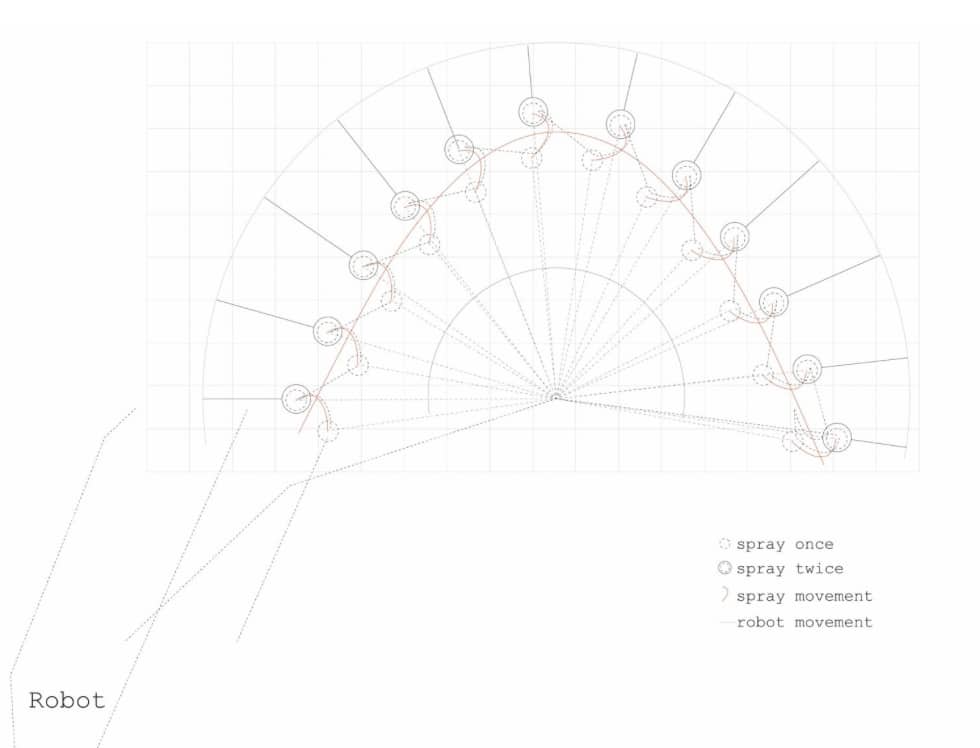
The lecture was conducted by Valentino Tagliaboschi, architect and building engineer whose career is situated at the intersection of computational design, digital fabrication, and robotics applied to architecture. Trained at the University of Pisa, his approach to the field is characterized by a methodology based on constant experimentation, iterative prototyping, and the intensive use of … Read more