Software III _ UN_LOG FACTORY

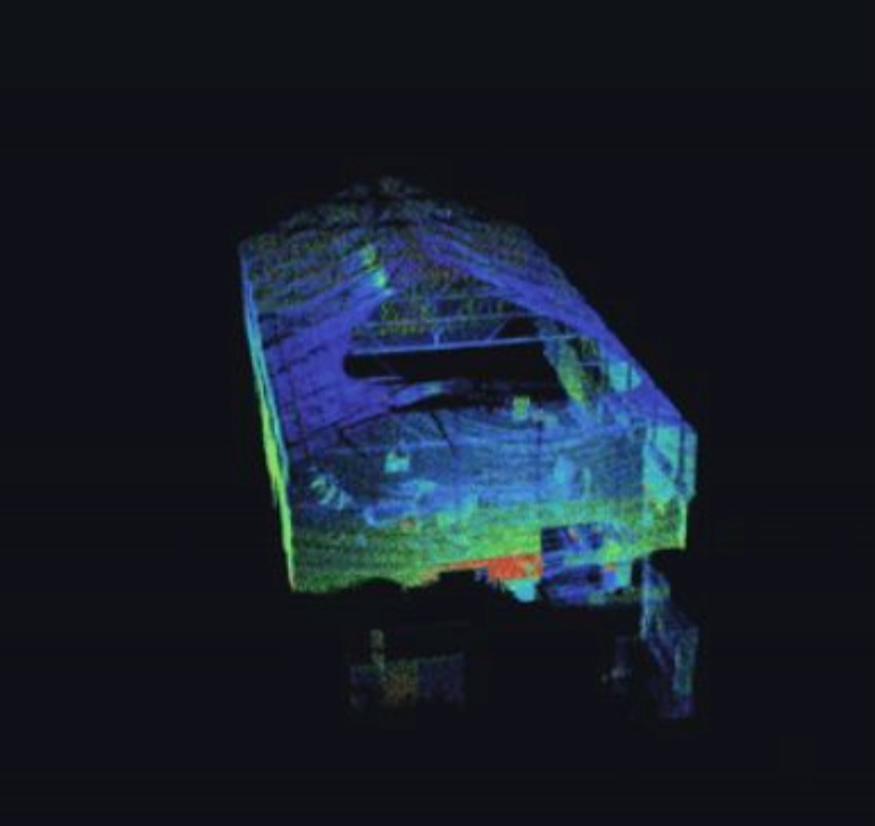
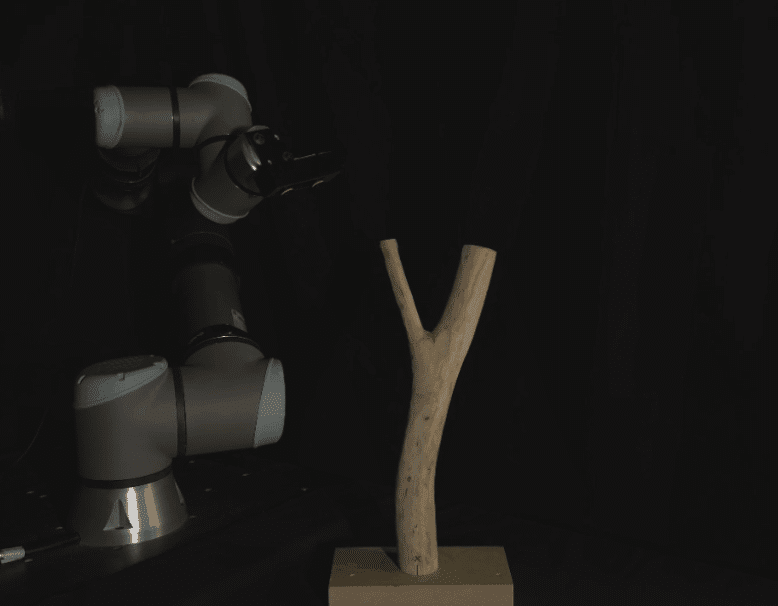
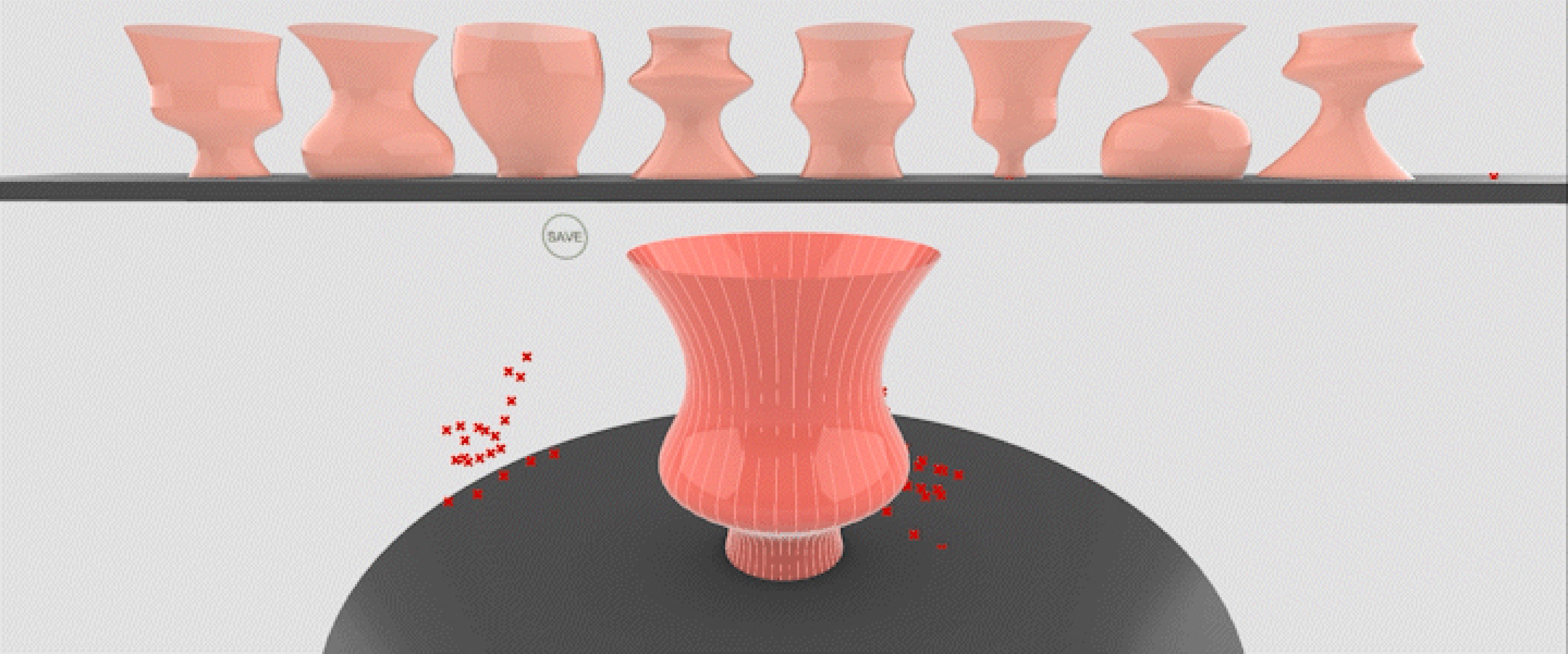
Github : https://github.com/Clarrainl/UN_LOG-Factory | INTRODUCTION | Detecting wood defects in 3D-scanned logs using Machine Learning In the timber industry, a significant portion of wood gets discarded due to irregularities or defects that make it unusable under standard practices. However, many of these logs can still be used creatively or structurally if properly understood and classified. This project … Read more