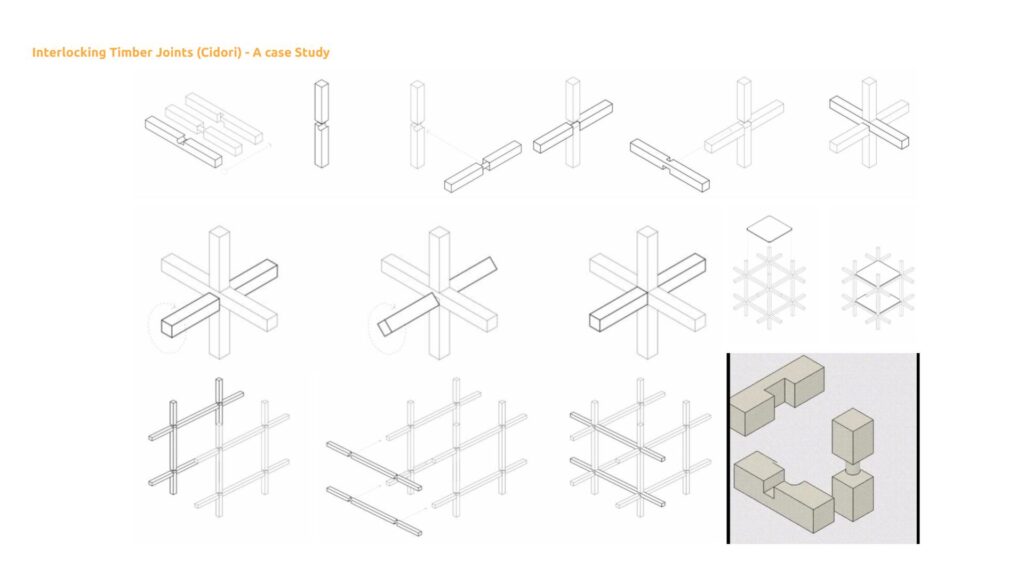
Robotic Fabrication of Friction-Based Timber Joinery: Burr Puzzle Assembly
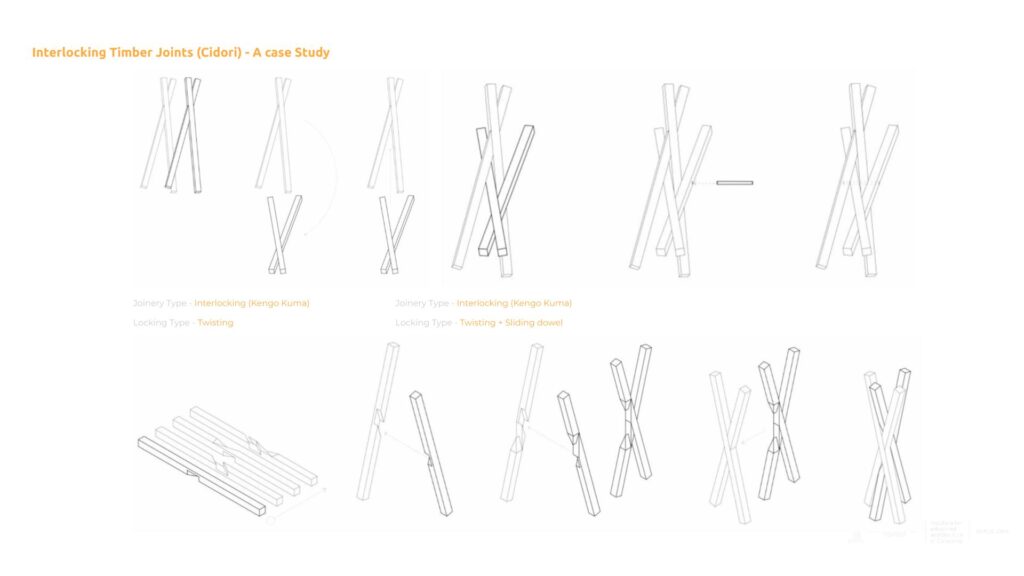
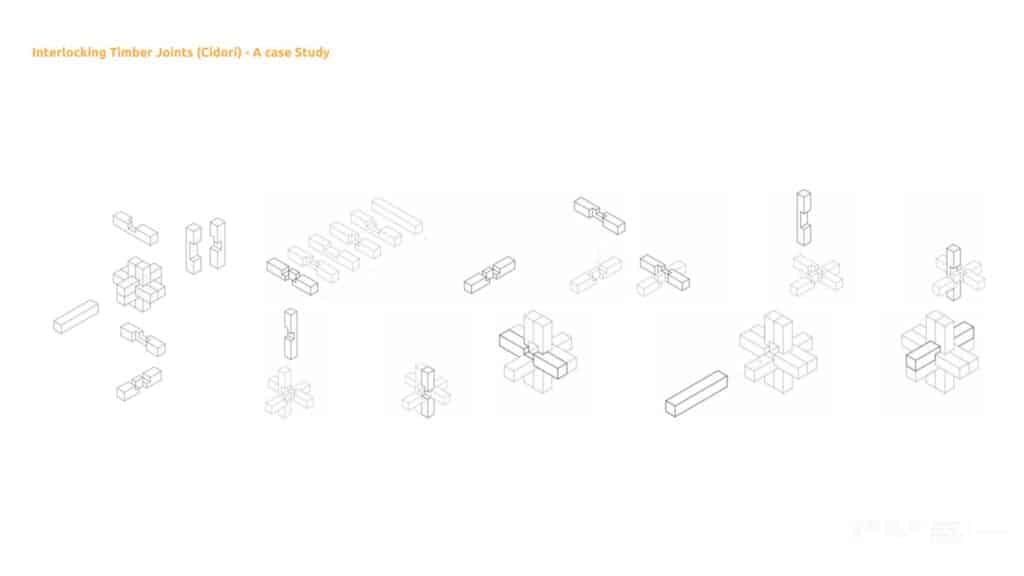
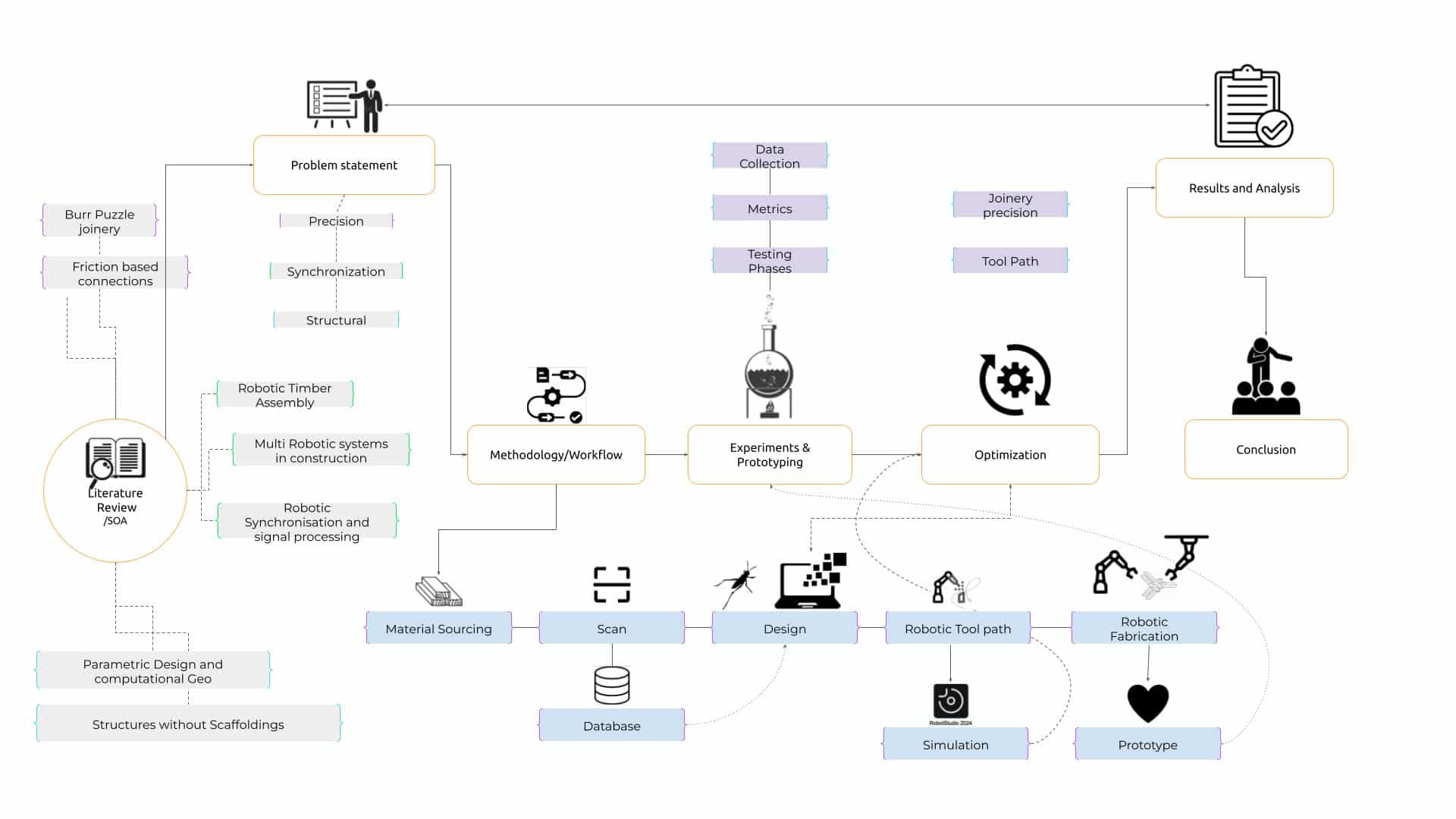
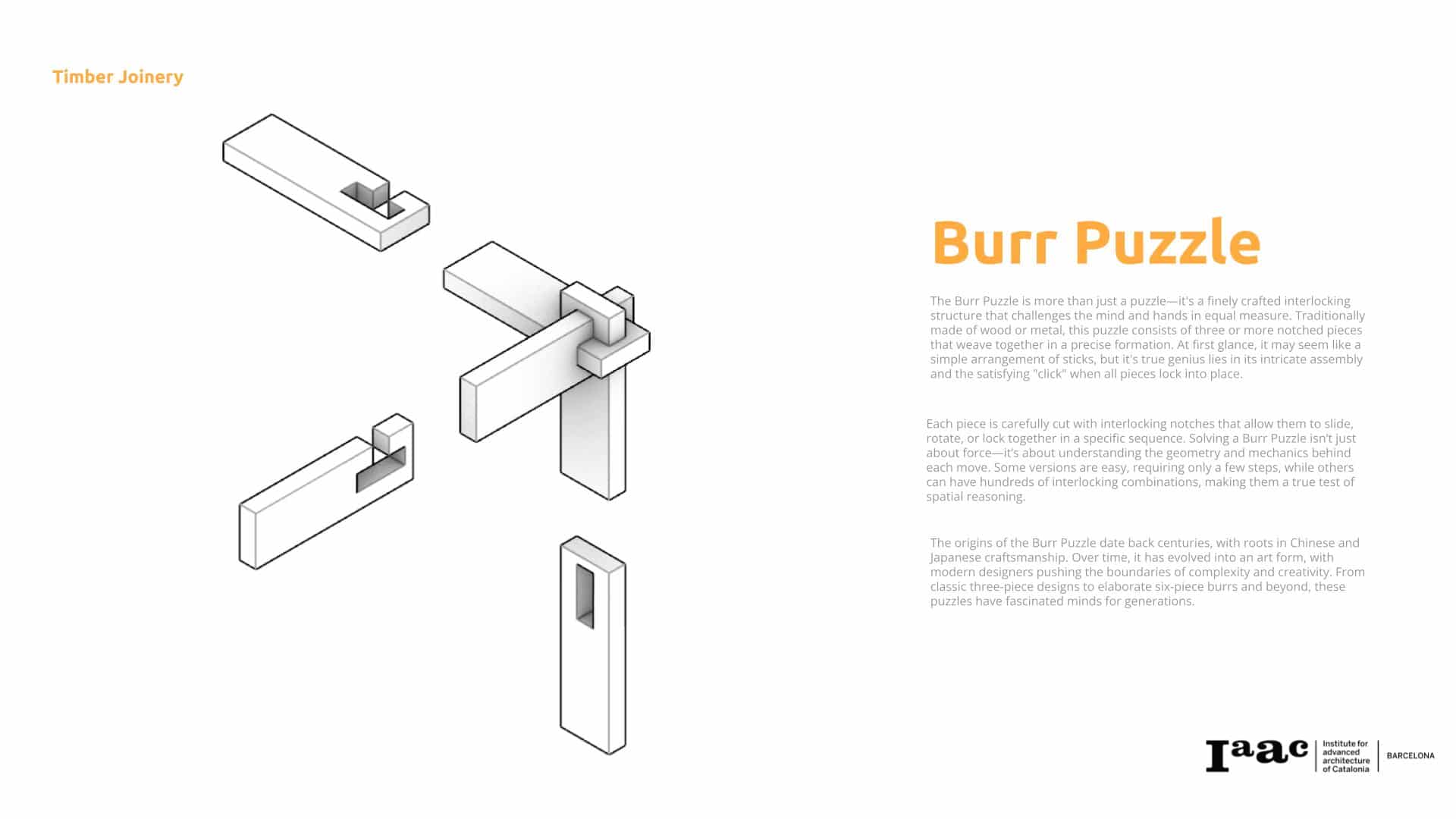
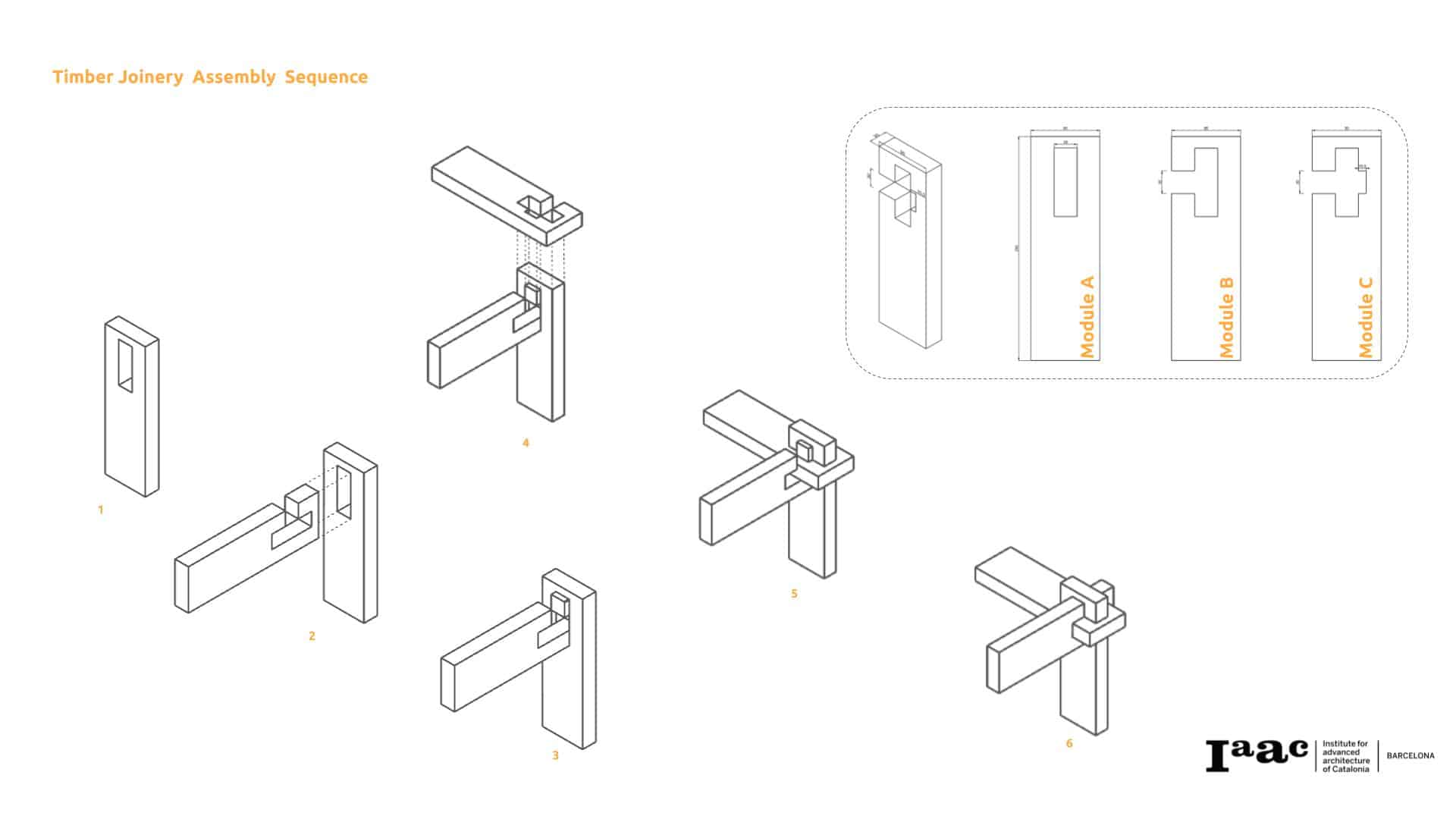
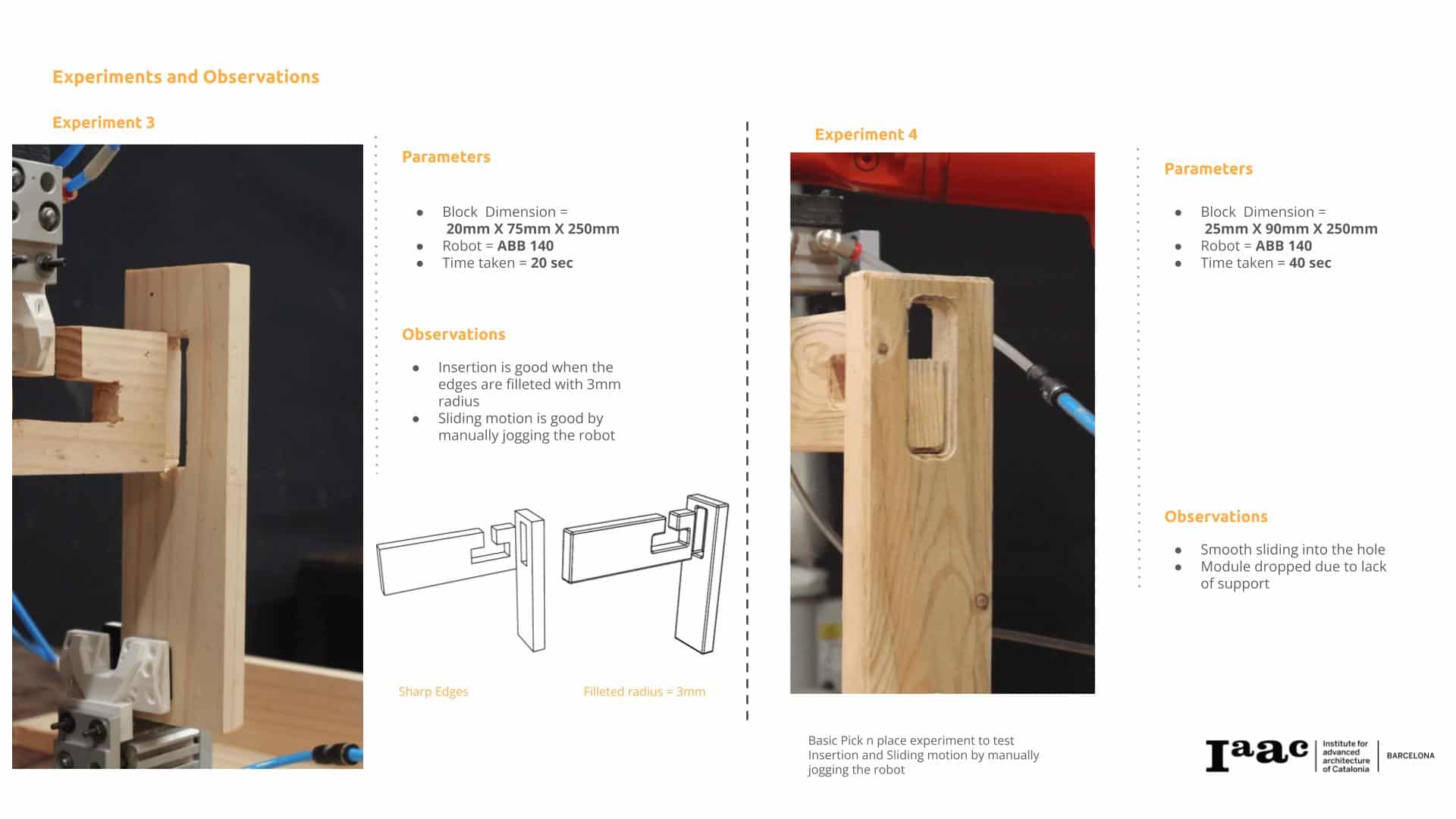
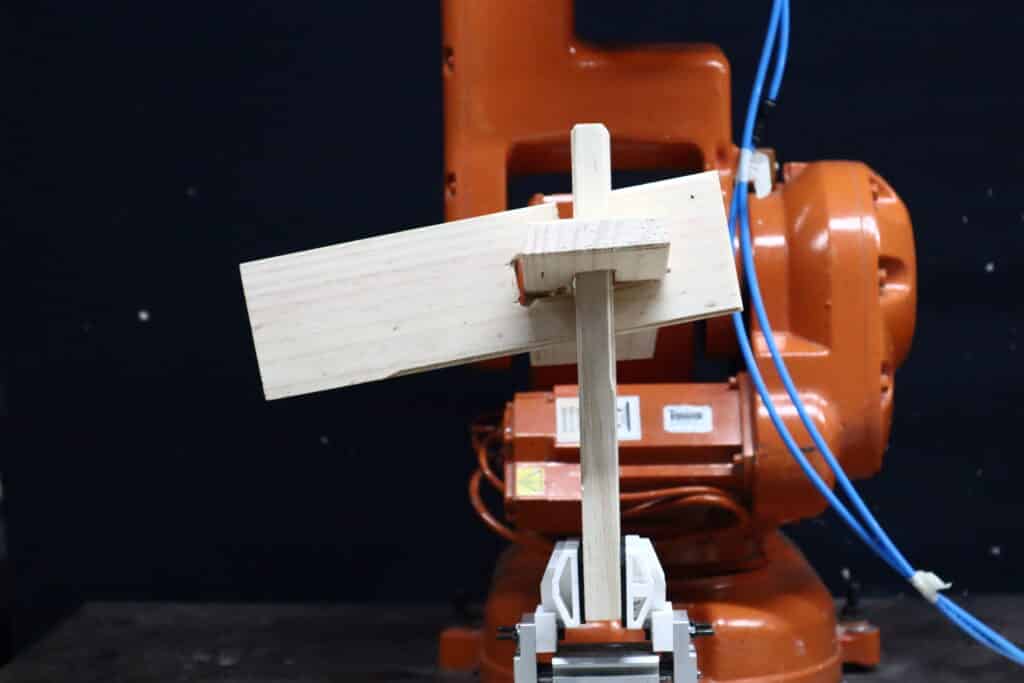
This research explores robotic assembly of friction-based interlocking timber joints using the burr puzzle as a case study. The puzzle’s tight tolerances and sequential assembly pose challenges.
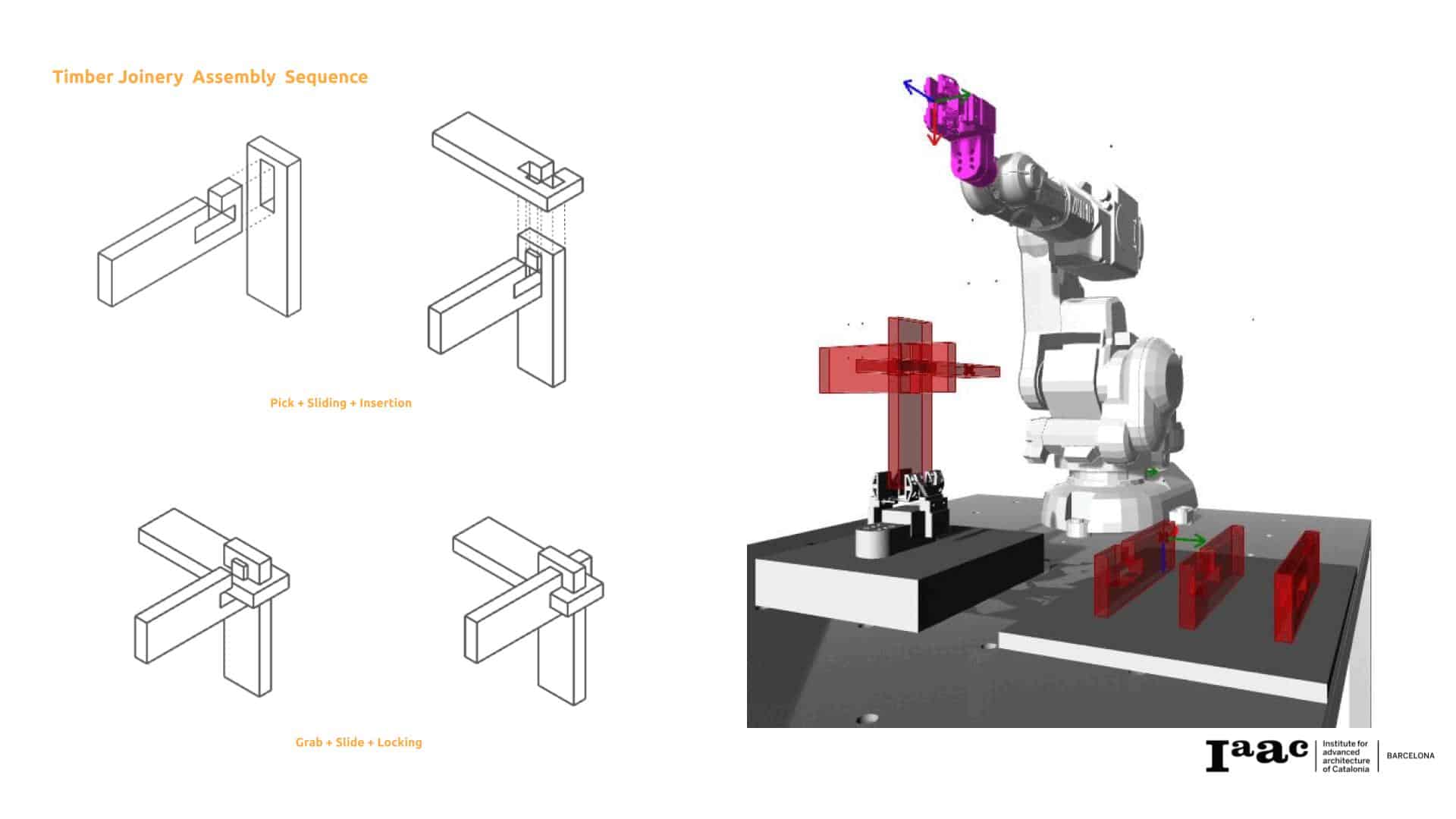
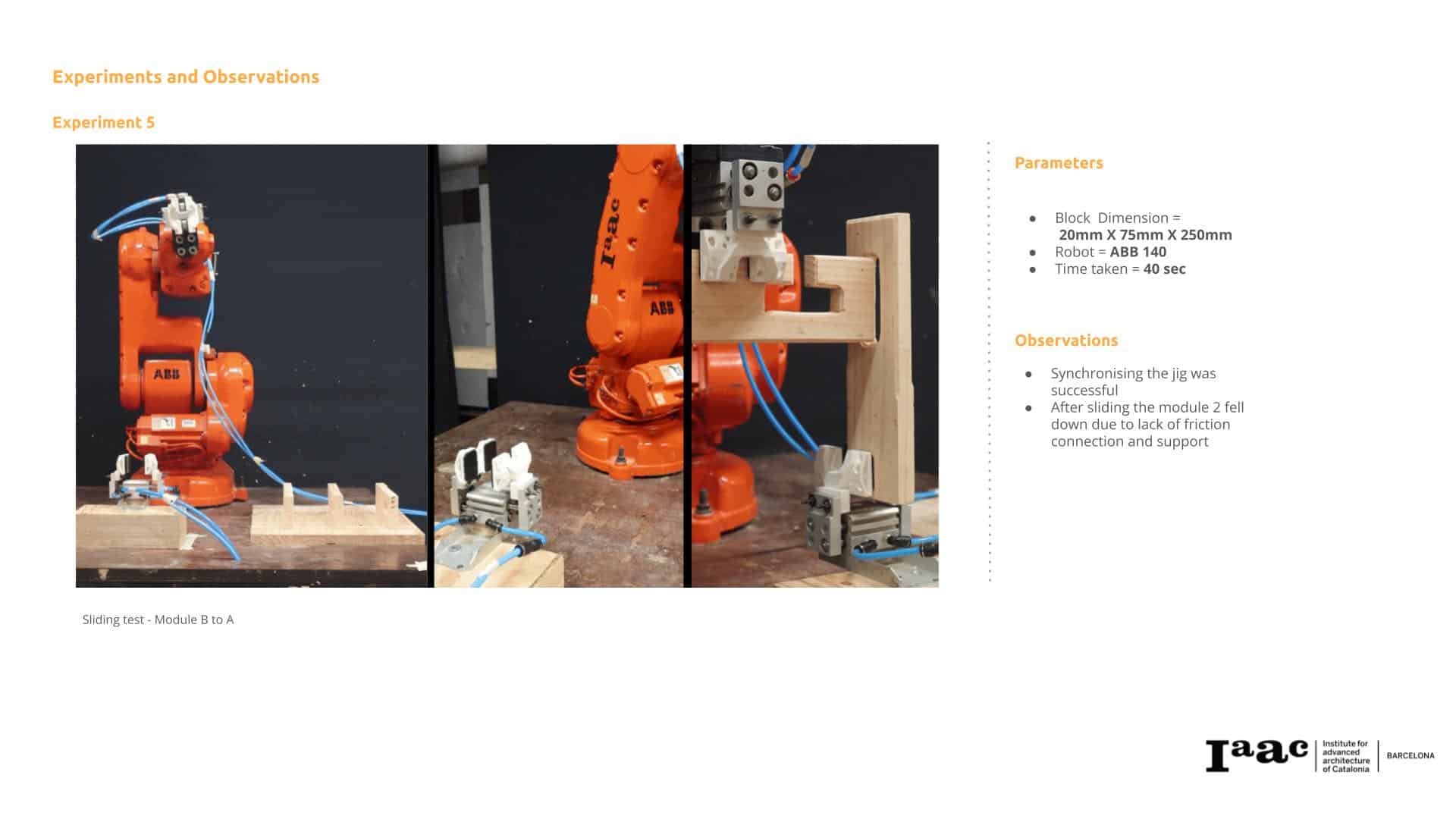
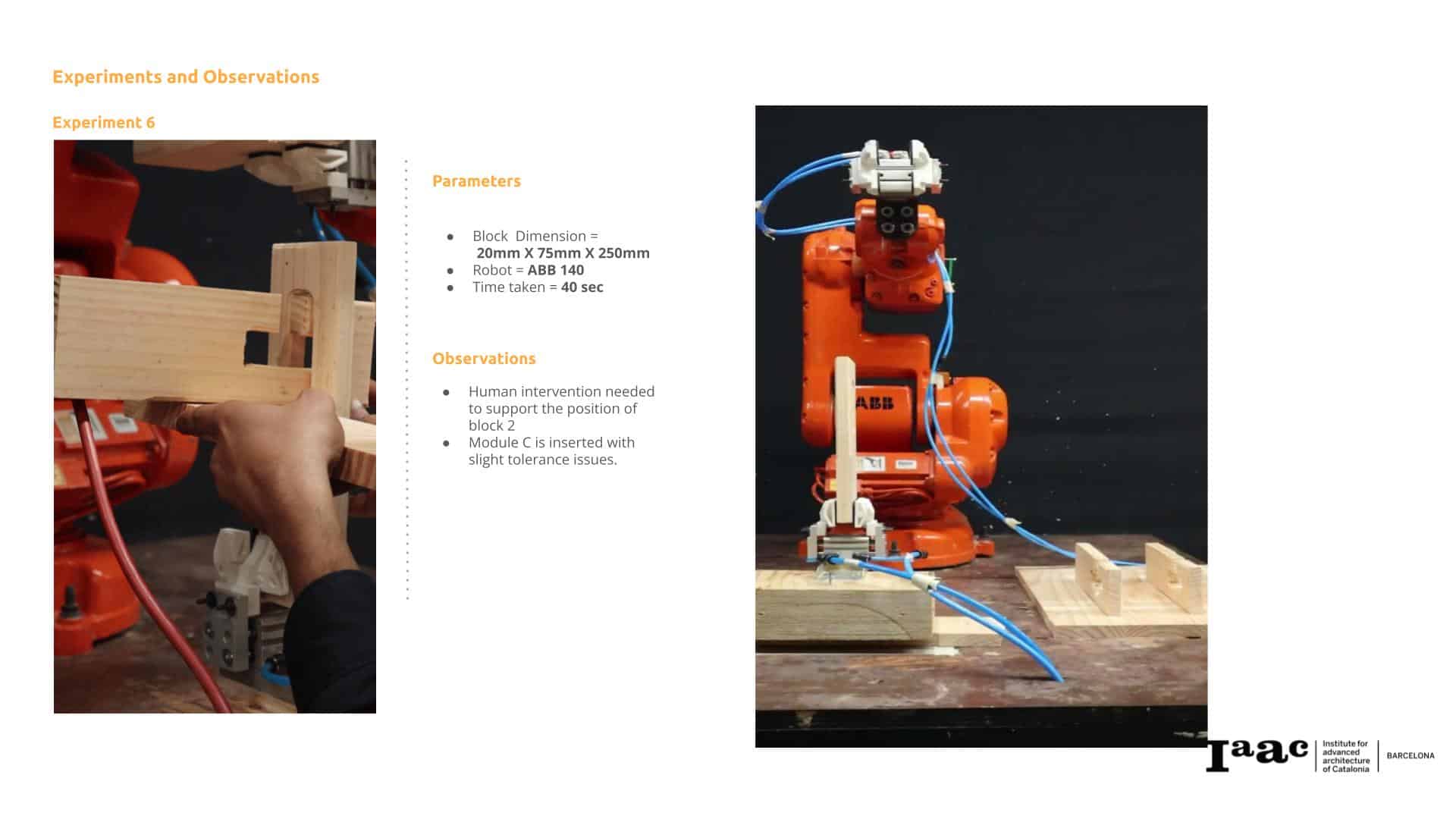
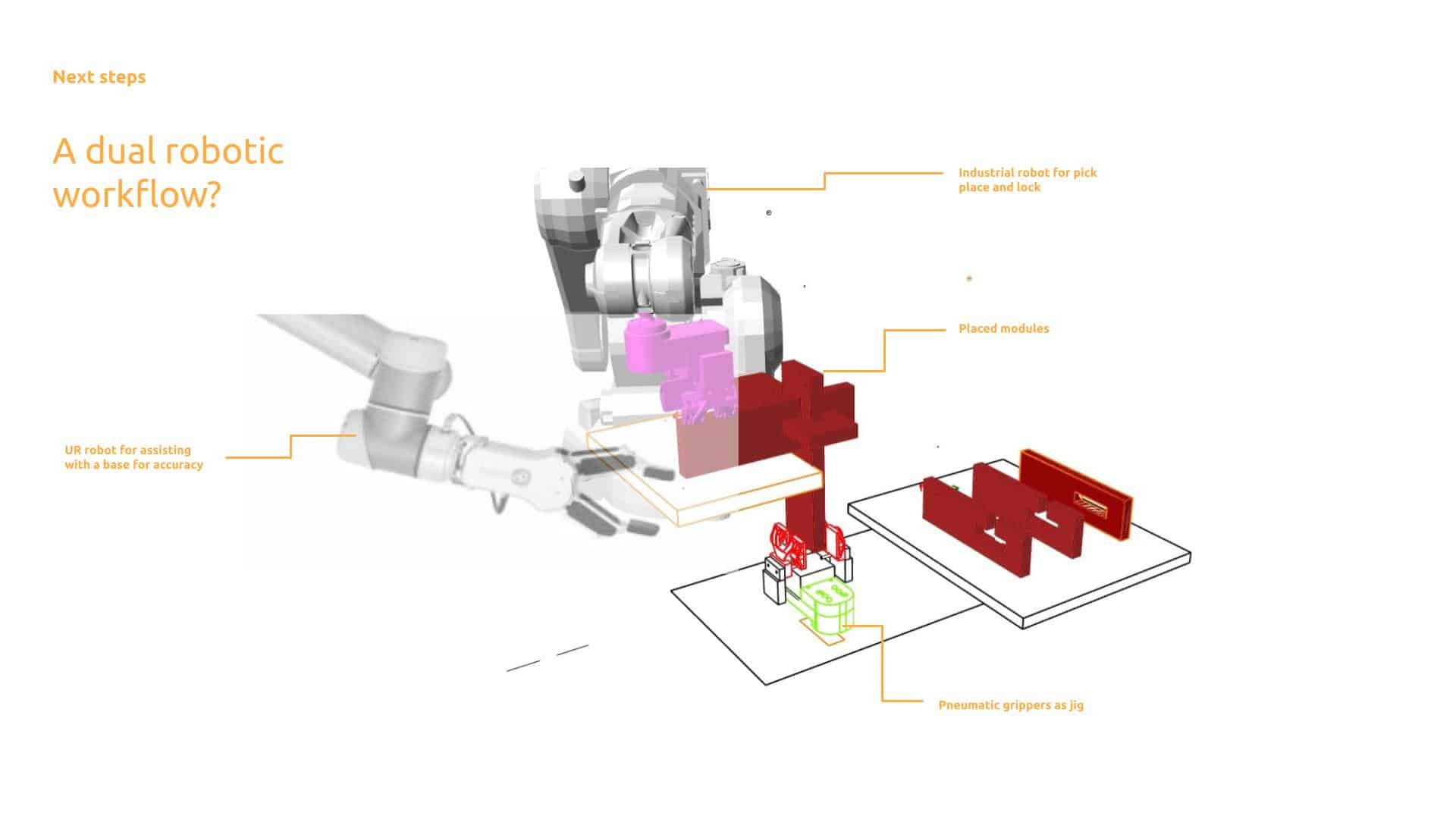
Through modeling and robotic execution, the study shows that while a single-robot approach is feasible, dual robots are necessary for efficient, accurate assembly. The research integrates parametric design and robotic path planning to ensure precise positioning without adhesives.
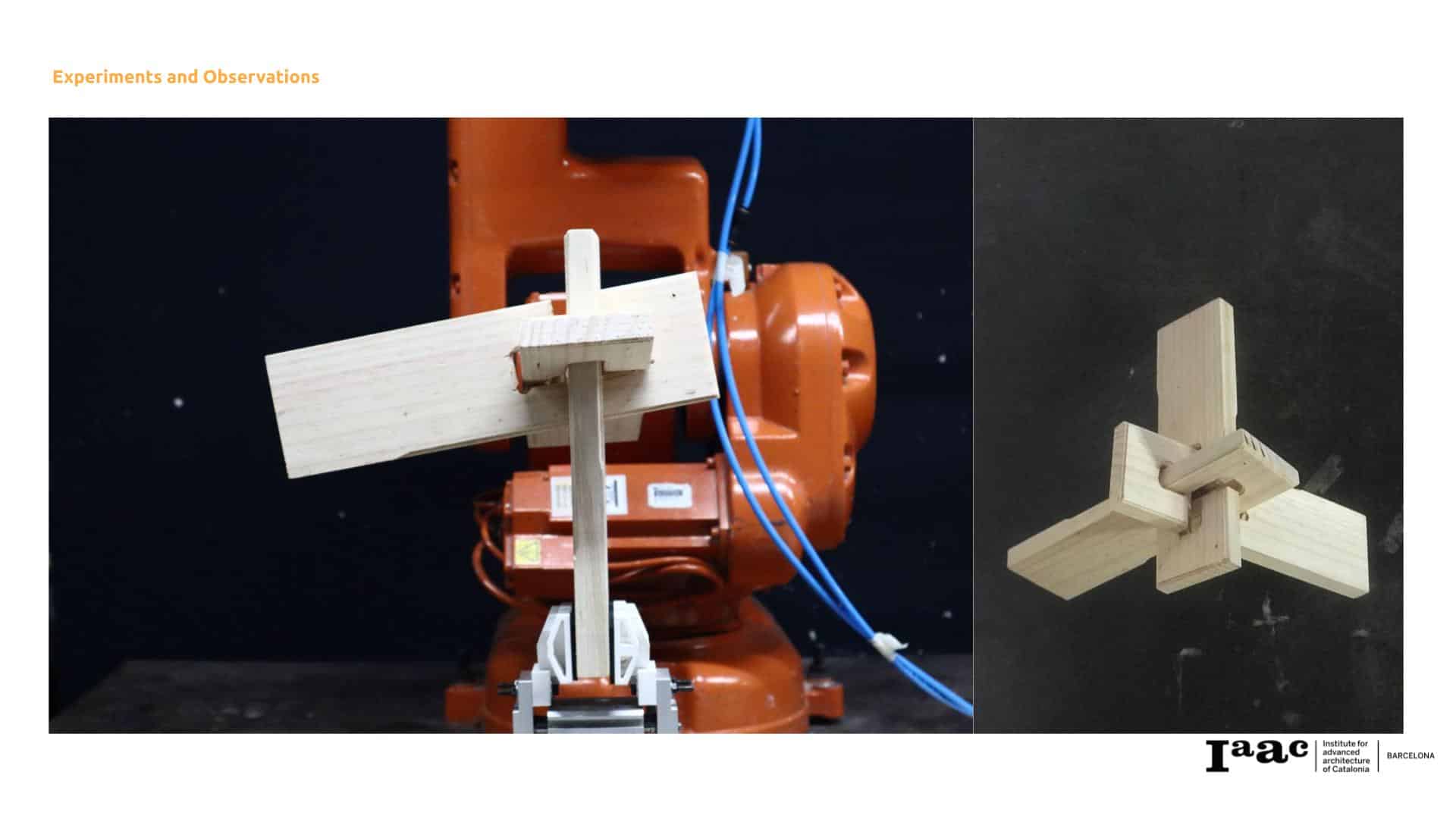
By leveraging friction-based interlocking, this study advances robotic timber construction, promoting modular, sustainable fabrication and laying the foundation for dual robotic coordination in future applications.