ROBOTIC SOLUTIONS FOR 3D SPACE ANALYSIS
AIM
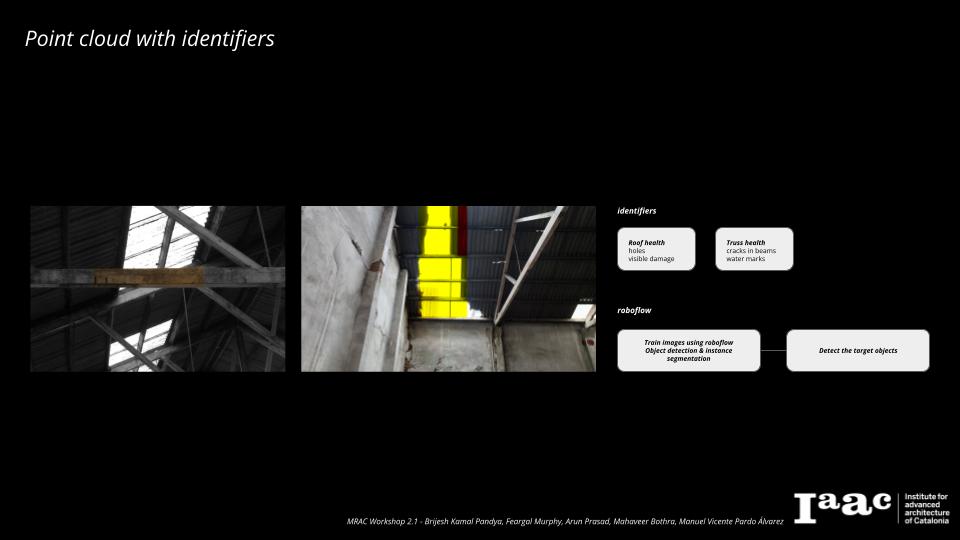
This workshop ran in collaboration with Noumena and IAAC where we were introduced to a environmental scanning and data processing workflows which combined the use of photogrammetry and point-cloud data. The site of the study was at IAAC’s new building which is yet to be constructed. From this data we would develop a deep learning model using robo-flow that would be able to analyze the current health of the roof and truss supports. Given the limited time of the workshop we treated this as an exercise in how to meaningfully extract and communicate findings through data in the representation of a point-cloud. this lead us to develop a web landing of the point-cloud that the user can interact and move within – this model would contain statistics linked to coloured points within the digital model.
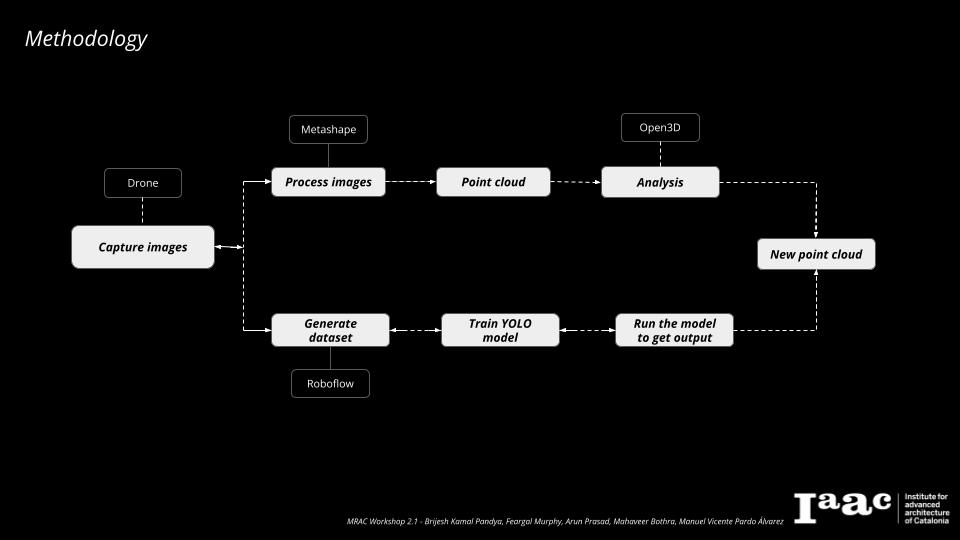
Data workflow
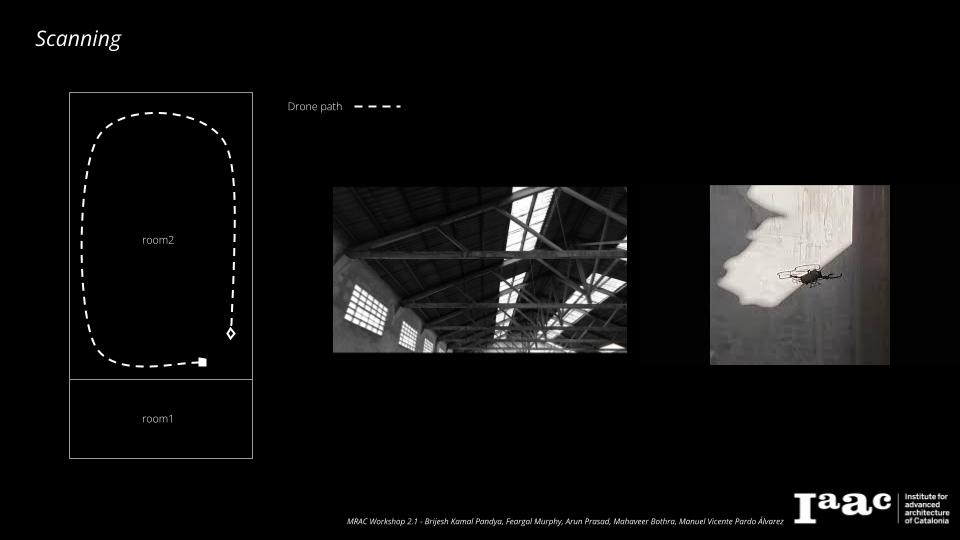
Drone scanning path
Point Cloud (Exterior)
Point Cloud (Interior)

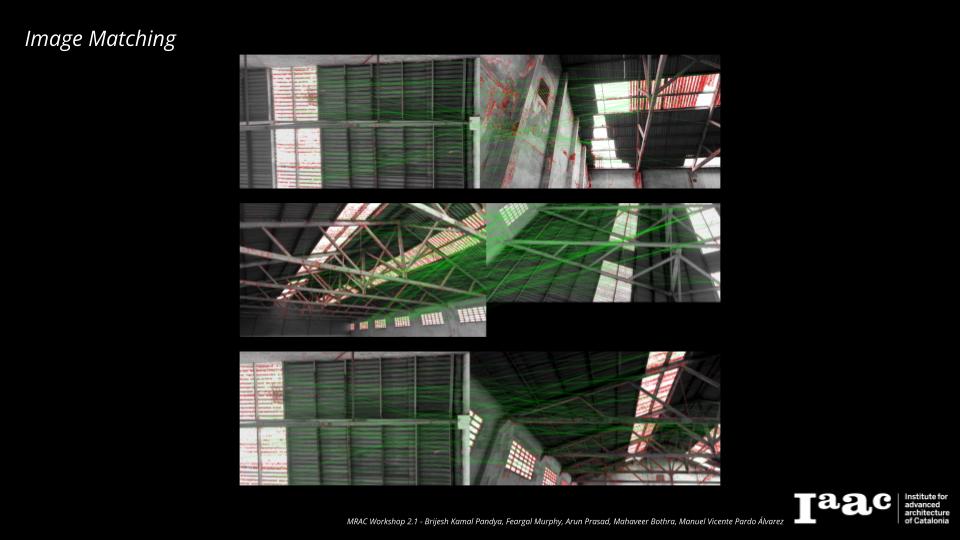
Image matching process
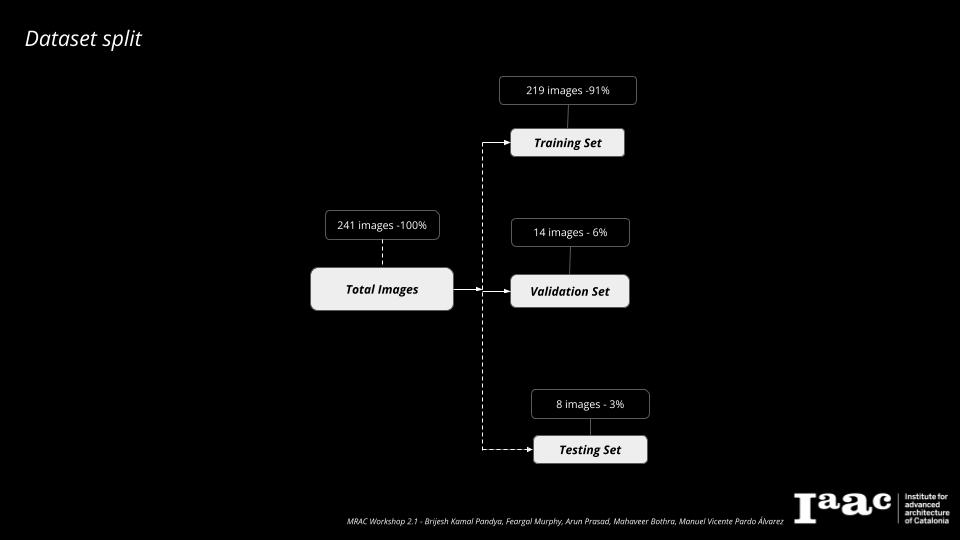
Deep learning data set methodology
Labeling in Robo-flow
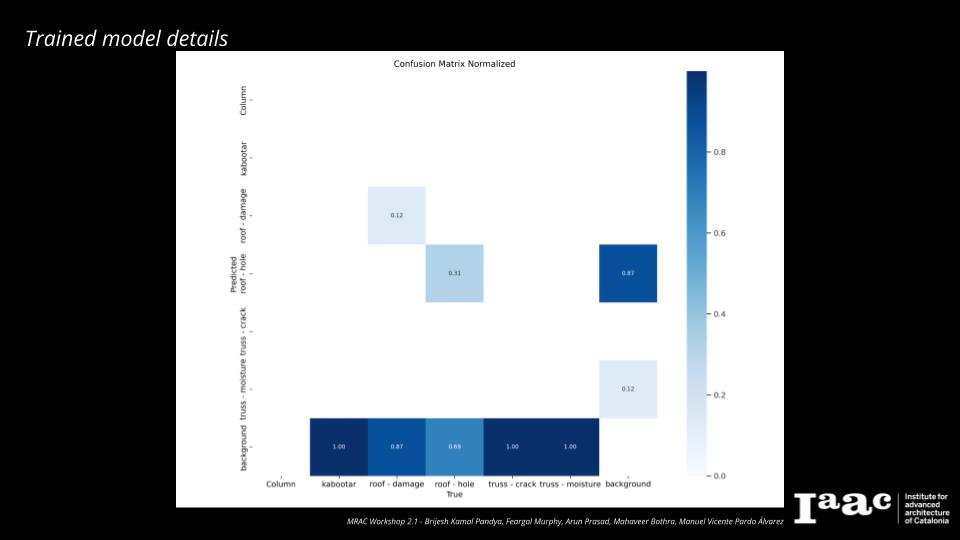
Results from the training matrix
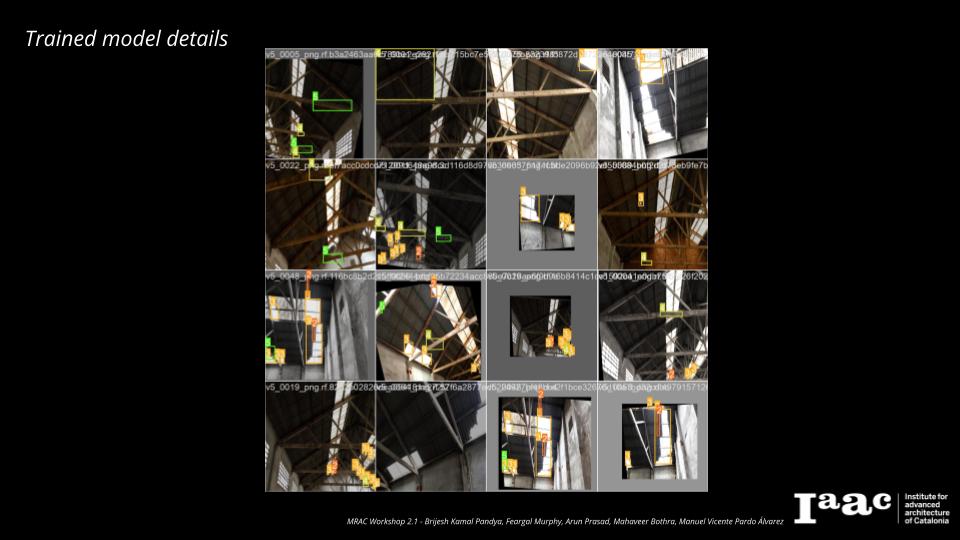
Trained model tagging processed images
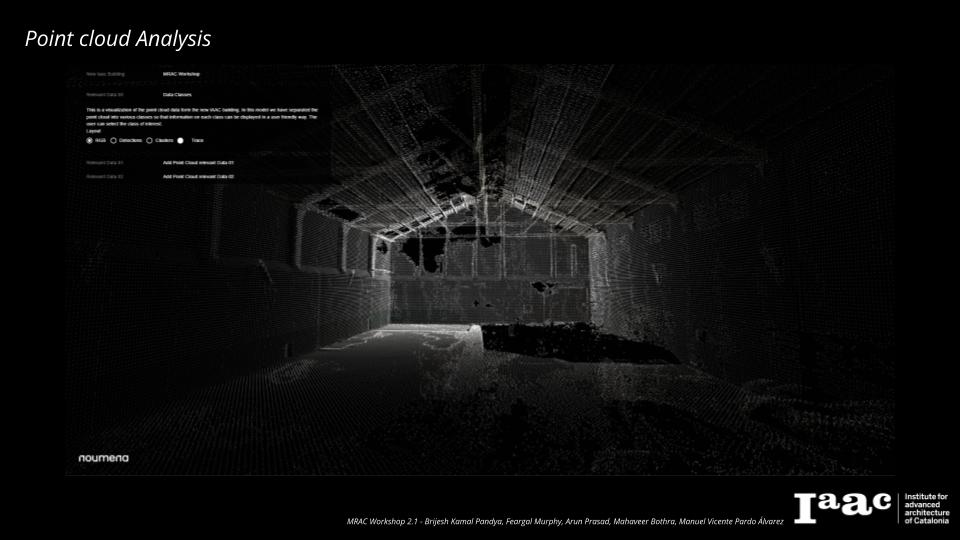
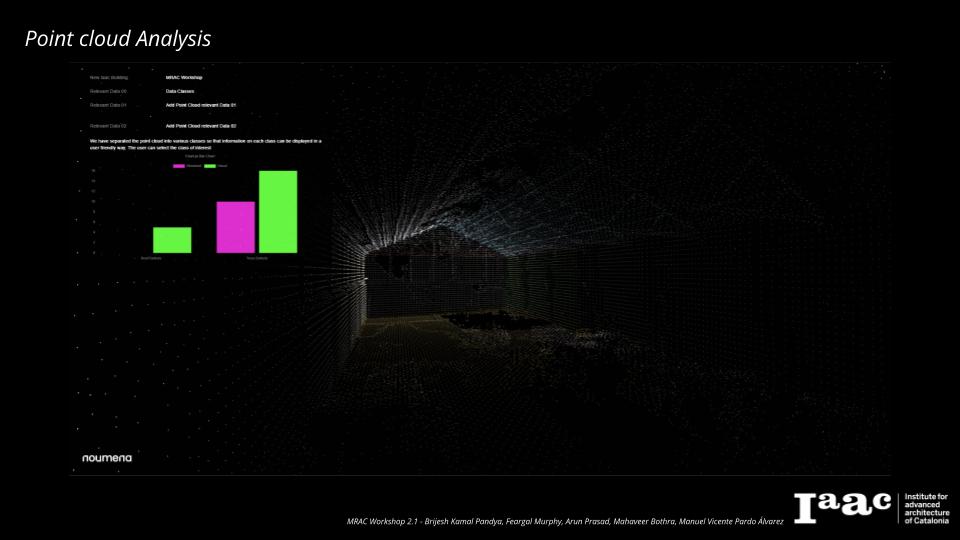
Point cloud data on web landing page