
Introduction
This seminar invites students to explore making custom made spillers controlled by Arduino and a 6-axes robotic arm in order to paint spills on canvas with black acrylic paint.
Context
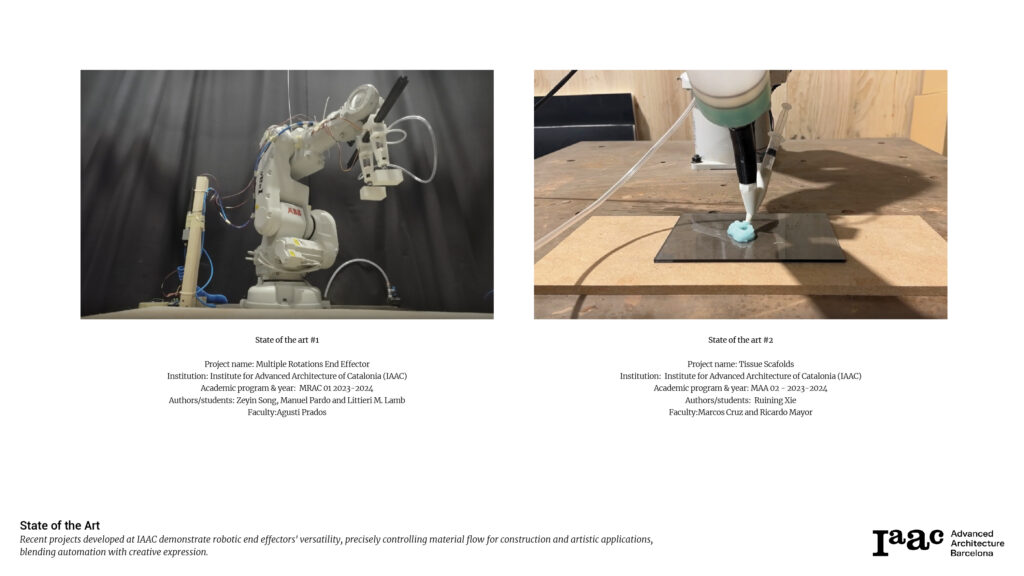
Recently we have clearly observed immense changes in production, prototyping, and innovation that has been influenced by open source software, firmware and hardware. Human creativity has been empowered with individuals crafting IoT devices, drones, robots, and custom made tools for specific needs.
Building in this context, the seminar invites students to explore recent developments within the open source hardware
and software ecosystem . Hence, students will work with to explore new possibilities in creating custom made tools with Arduino in order to create their own end effector.

Aim
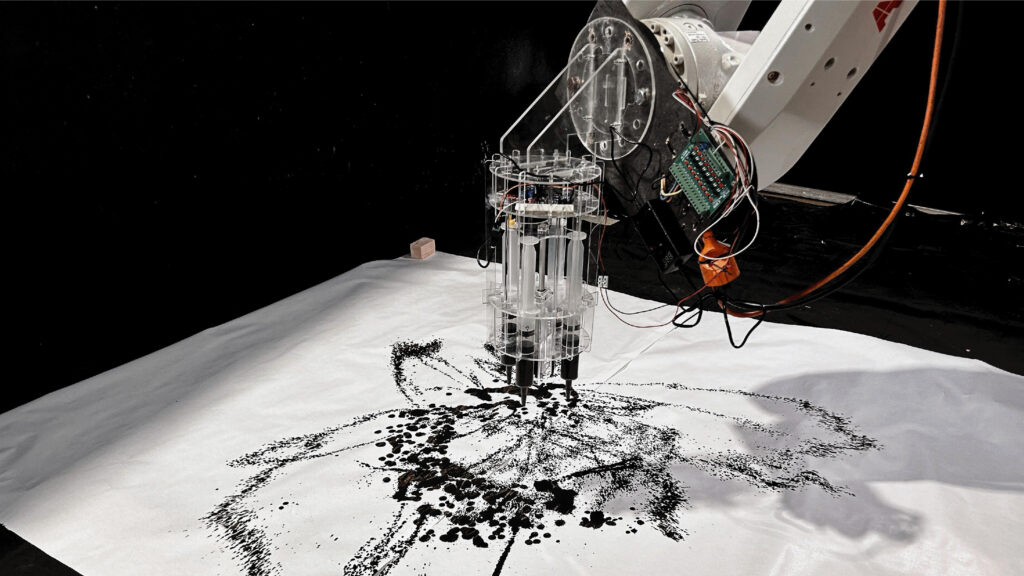
Students will explore different ways to create spill paintings by using their own end effector with a 6-axes robotic arm. The goal is to create a painting that will use basic parameters as height, rotation, speed and pressure, in order to calculate specific ways that a custom made tool can cause a measured result. So even if there is no intent to create a spill painting with a specific construct , the goal is to put some order to the chaos by creating a painting that can be distinguised by a viewer as a result of a robotic process and not a random human made process.
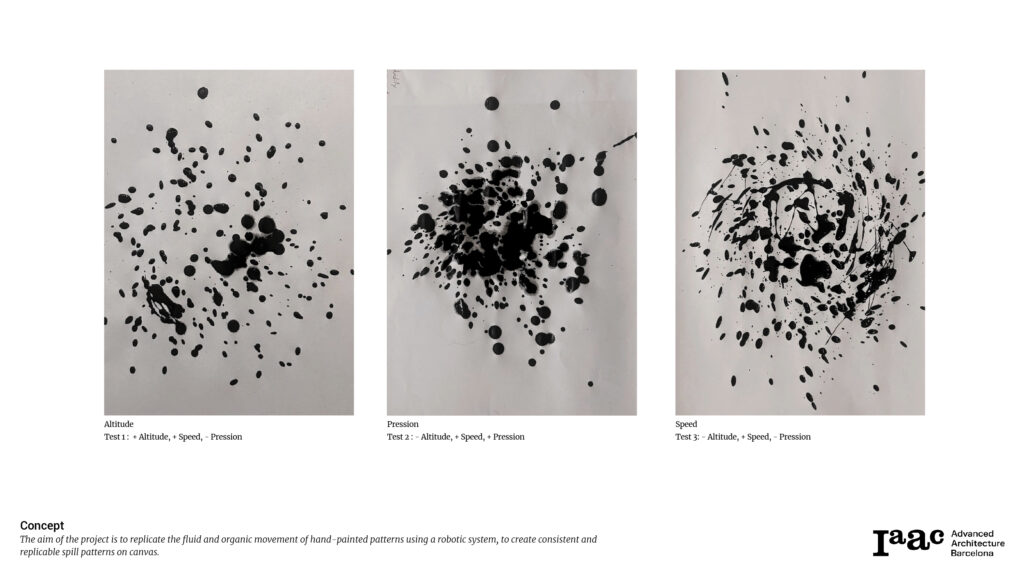
Initially some tests were made to define and distinguish the behaviour of different spills and the correlations of the parameters. These parameters can play a role on how the acrylic paint will flow.
Brainstorming
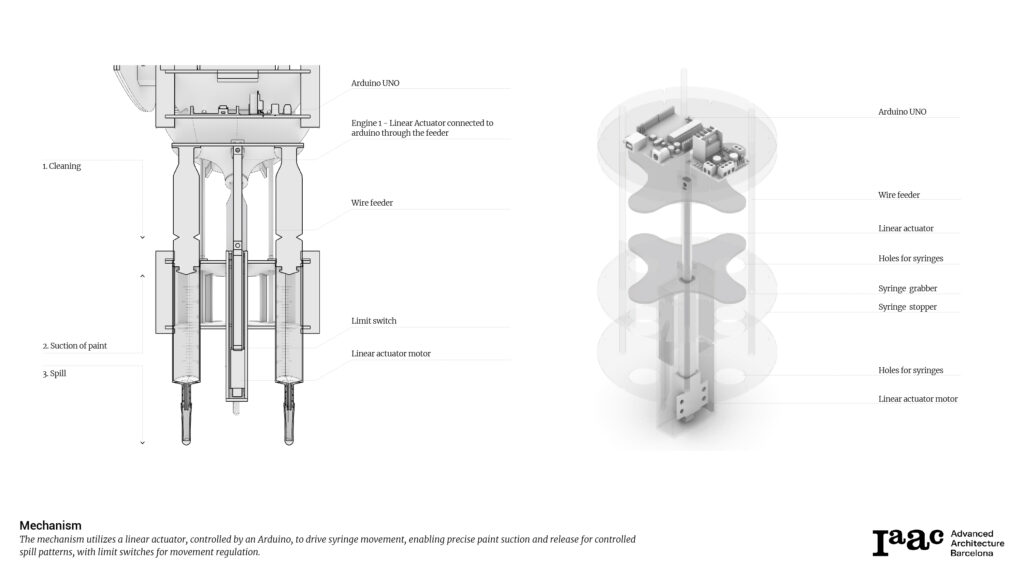
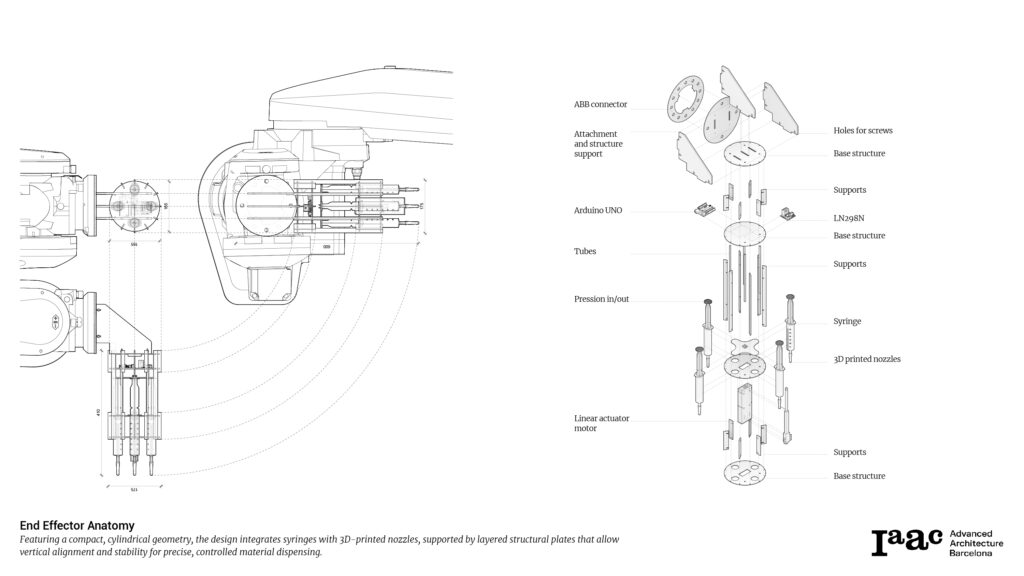
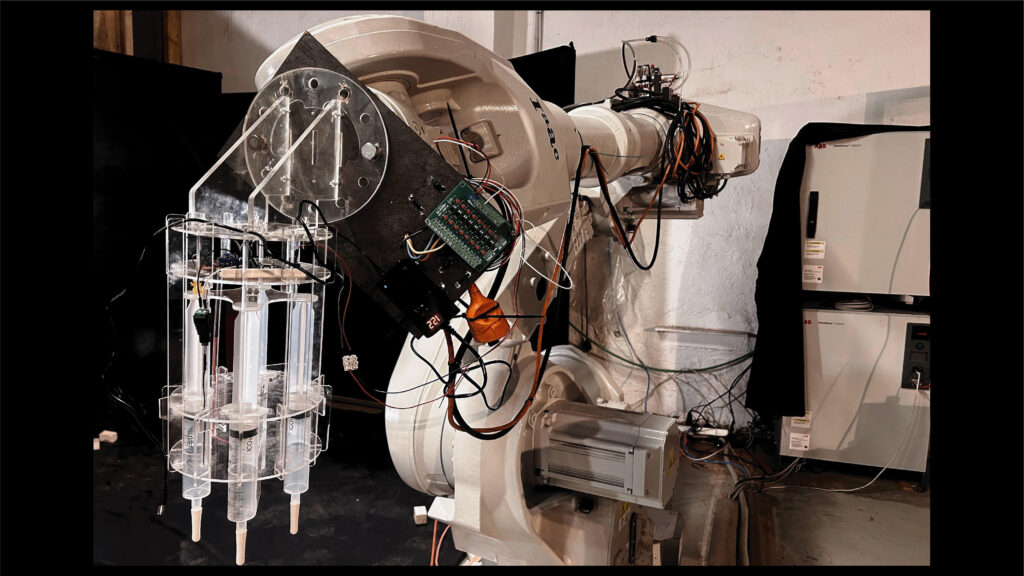
For each basic parameters there is a need for a specific modification-tool inside the ende effector. The syringes were chosen as a tool to pressure the paint out the end effector. After some iterations a structrure was designed to hold the syringes on the end effector.
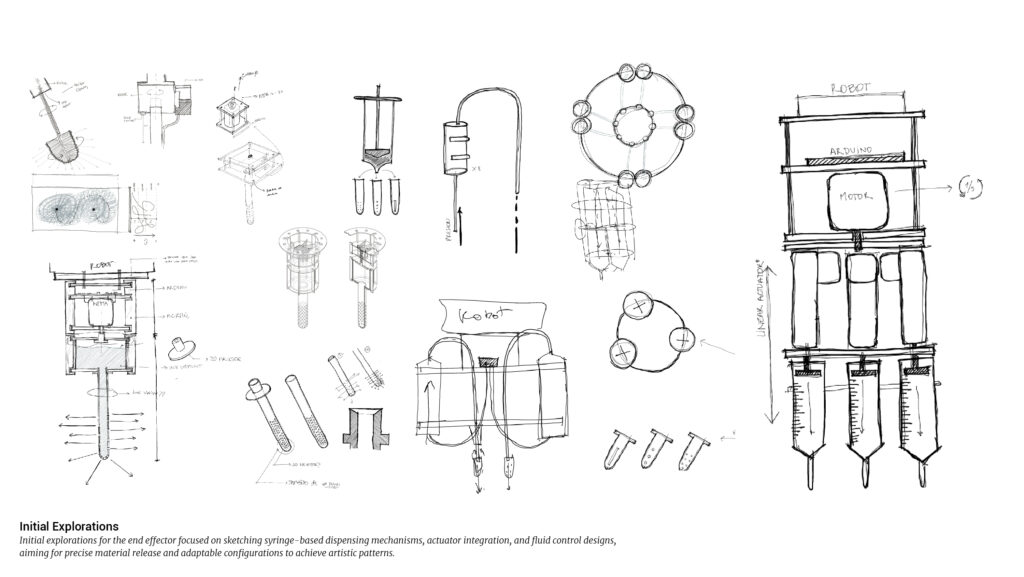
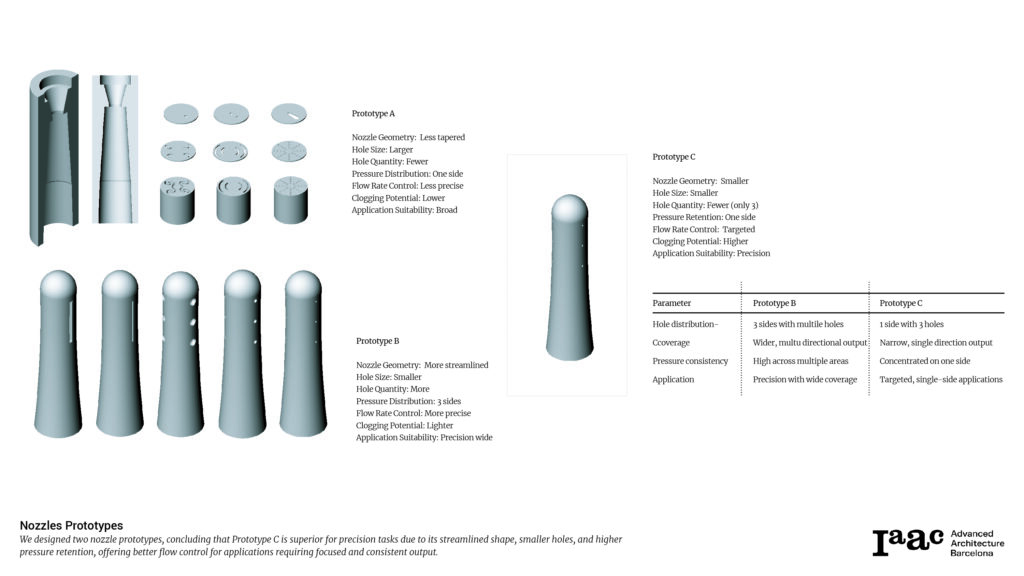
In order to create different patterns iterations of different geometries of nozzles were created.
After the creation of the basic structure of the end effector there was a need of a linear actuator that would push the syringes in order to control the speed of the flowing paint.
Animation of the Motion :
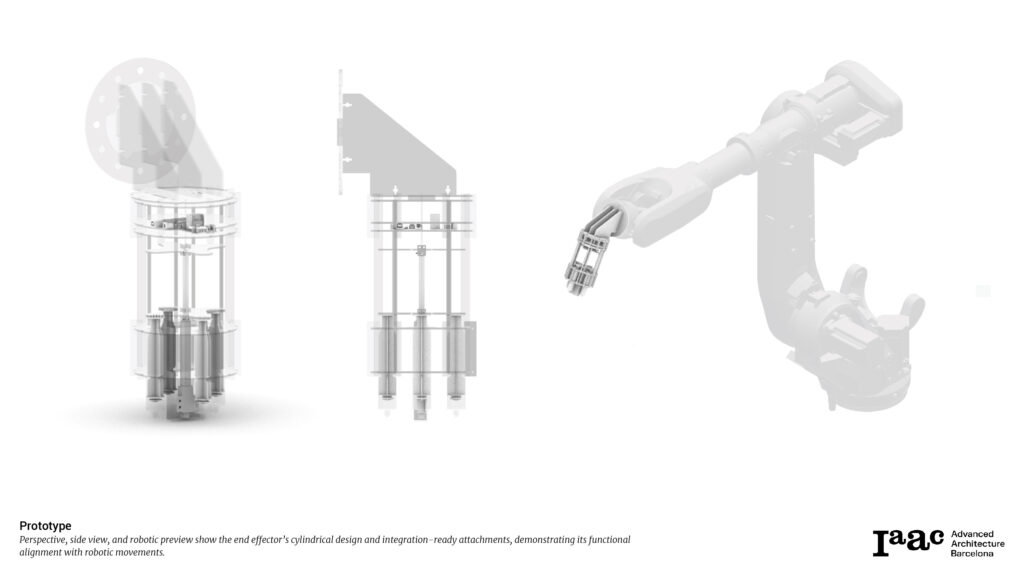
The parameters of the rotation and height could be controlled by new electronic tools but since we use a robotic arm we can just manipulate the movement of the robot to control those parameters.
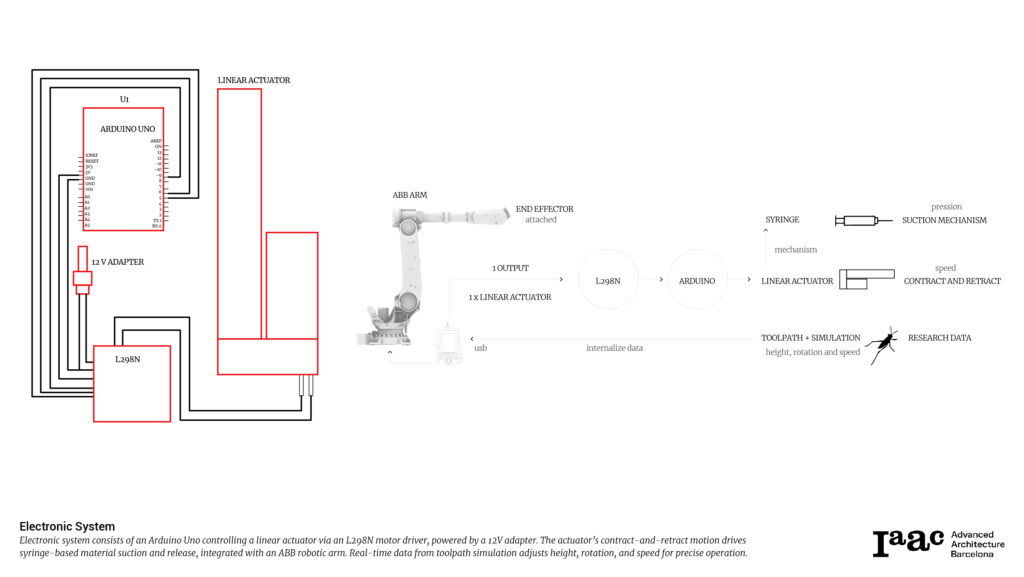
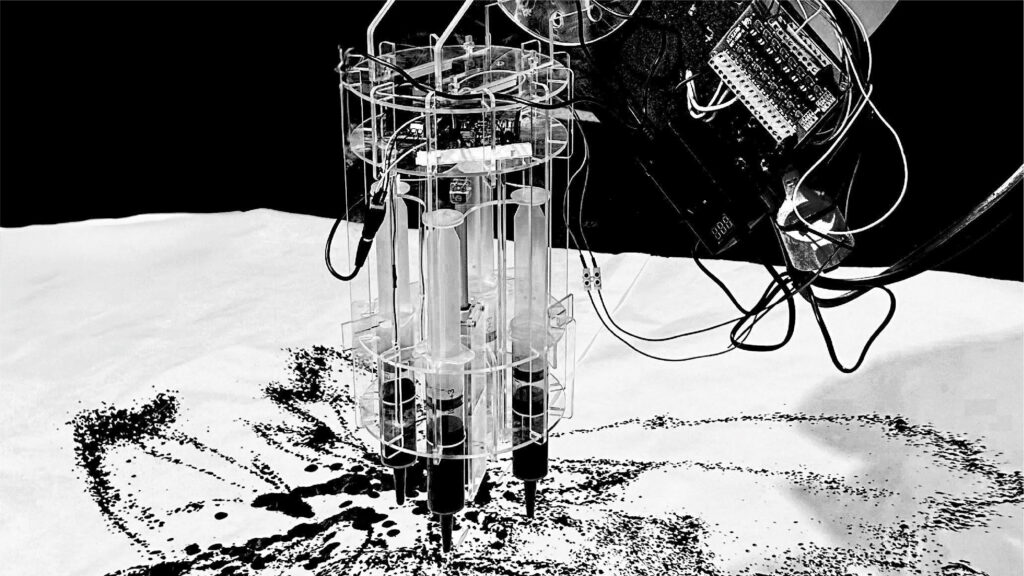
So we have an end effector that uses basic parameters of height, rotation, speed and pressure to create a spill painting. The Arduino controls the linear actuator in order to push the syringes that can use air pressure to control the flow of acrylic black paint out of some nozzles with specific geometries. The robot controls the height and rotation of the end effector in order to cause a specific calculated pattern.

Video :
GITHUB LINK_
https://github.com/MRAC-IAAC/Paint-Sprinkler-
