Software -II- Brick-Scan
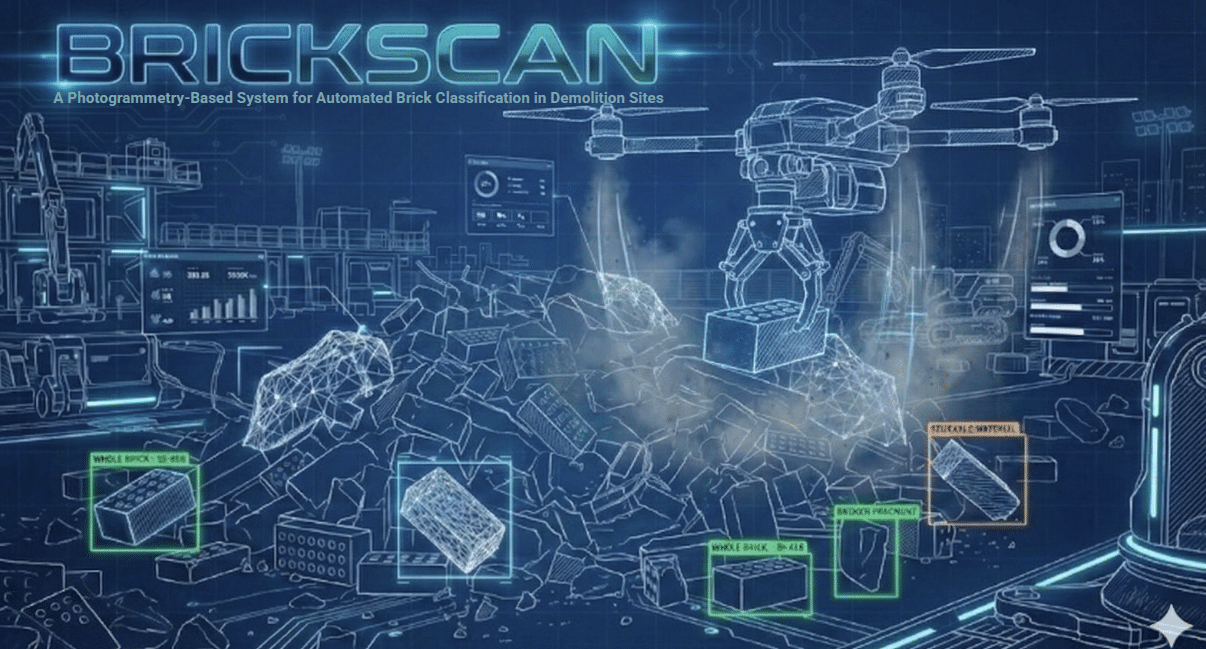
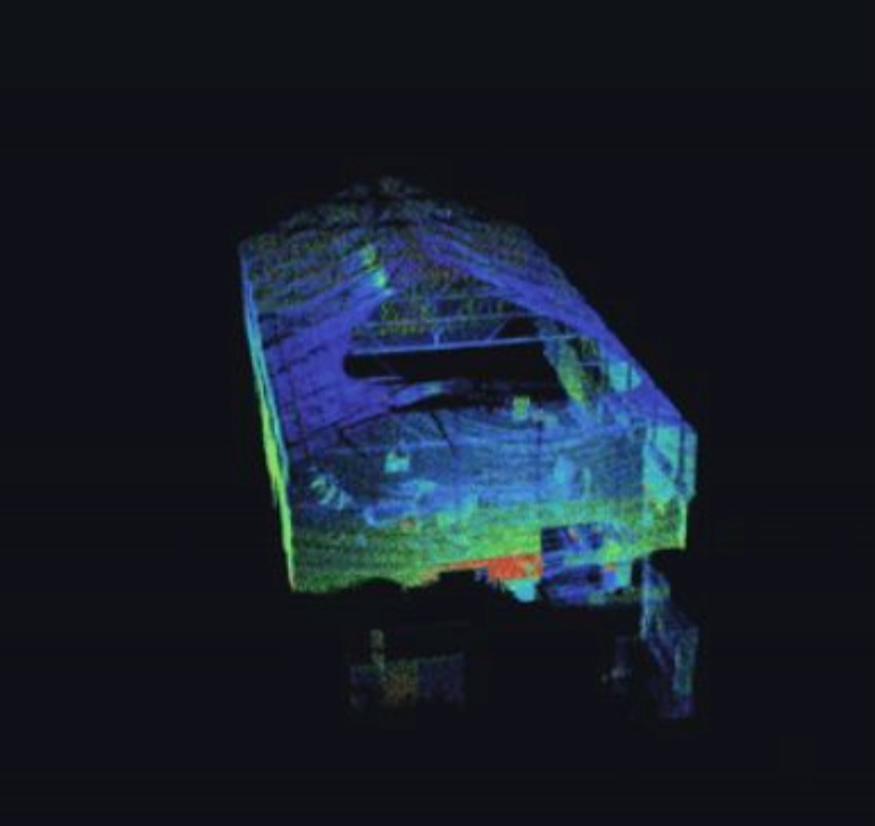
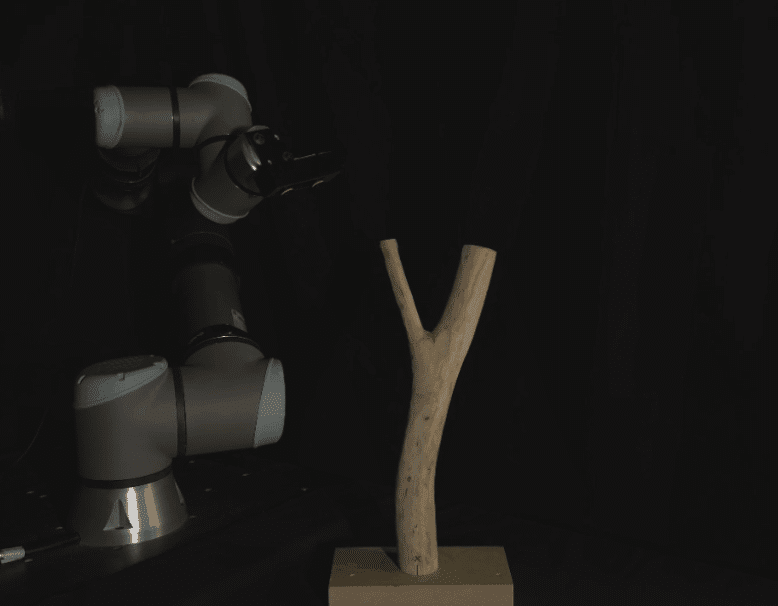
This article presents a project exploring how collected data can be processed and translated into automated classification and robotic decision-making logic. The core concept revolves around studying the physical condition and spatial arrangement of reclaimed construction material, extracting geometry-based and surface-level information to generate a data-driven sorting and retrieval workflow. By combining artificial intelligence with … Read more