Abstract:
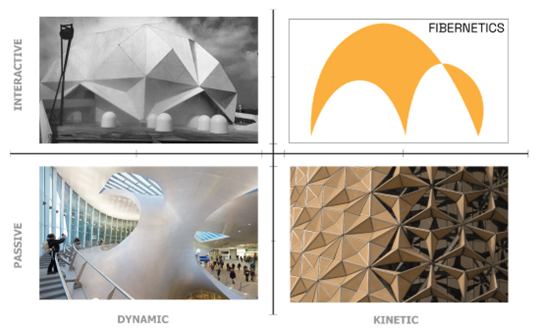
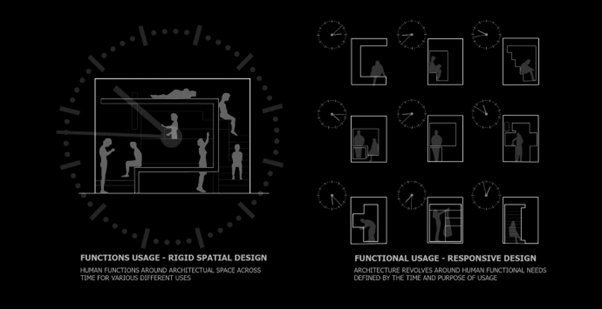
Architectural space has been non responsive to the dynamic and changing nature of social interaction. Building on the history of responsive architecture, interactive design principles and technological developments in sensing, processing and actuation, the project proposes a new model that merges kinetic architecture and cybernetics.
Creating adaptive configurations through automated kinetic architectural skeletons, employing predictive models rooted to responsive spatial cognition, based on occupancy patterns and environmental parameters.
Keywords
- Kinetic Architecture, Cybernetics, Adaptive Spatial Configuration, User-centric Architecture, Autonomous Systems
1. Introduction
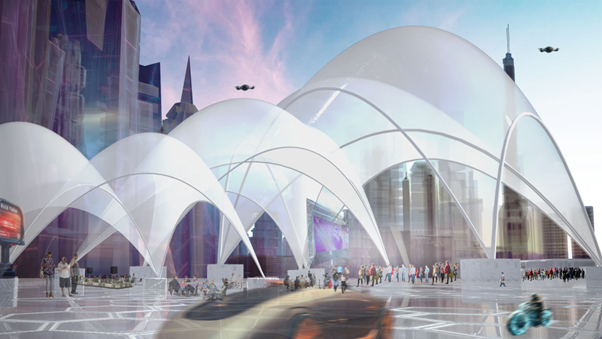
Fibernetics approaches the conjunction of kinetic architecture and cybernetics, drawing inspiration from recent technological advancements such as machine learning and automation. Fibernetics combines the interactive aspects of kinetic systems, which is sensing, processing and activating. And integrates autonomous robotic system to create a spatial cognition in design practice.
A swarm of such systems contributes to an intelligent space which contributes to the built space with all its intelligence. Such network of built spaces can be attributed from a varied scale of architectural aspects from interior spaces to individual units, from units to buildings, from building to urban. Such network of intelligence becoming a part of city data wherein aiding to a smart network.
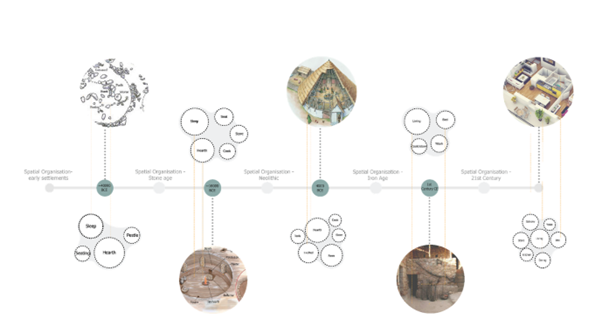
2. Architectural Aspect
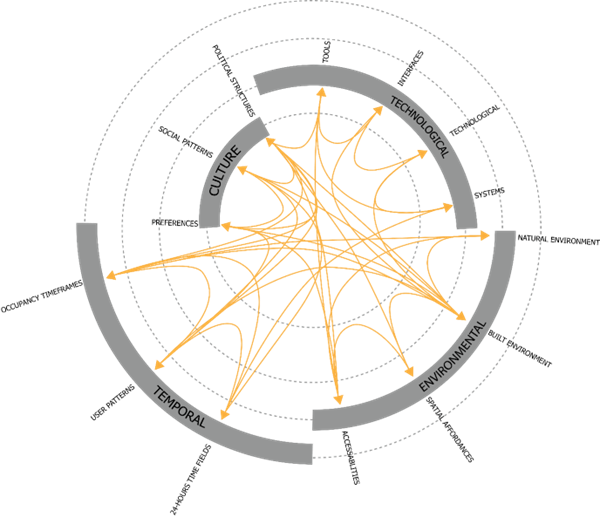
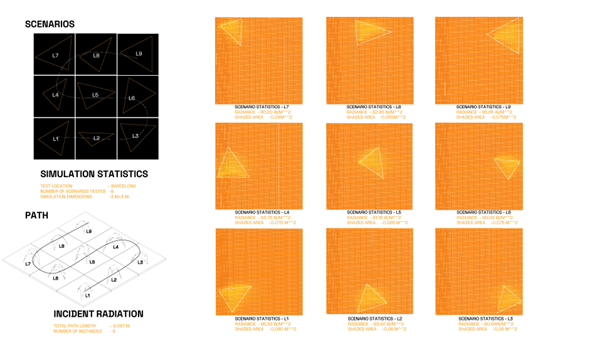
Fibernetics initiates the project with mapping fundamental spatial metrics such as occupancy metrics which includes user patterns on a particular space on a particular function. The metrics breaks down the occupant’s data into, the amount of time the user takes to navigate through the space while tracking the coordinates of the path throughout the navigation. The second set of metrics derived from environmental parameters such as heat which in turn informs us on the thermal comfort comes in as radiation data relative to the environmental conditions and the location of the space.

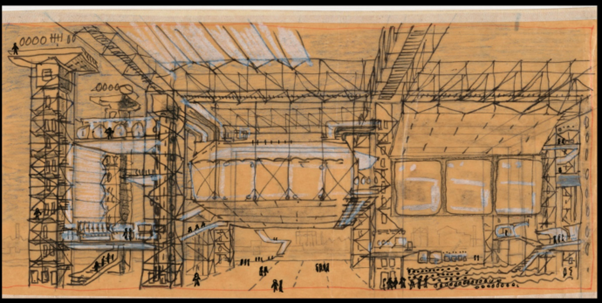
Drawing inspirations from projects and researches such as “The generator project”, the intelligence of buildings, self-aware space takes its roots from its 1st recorded bibliographies. Taking into account the needs of users as a point of reference and the functions as the primary dictating force of the spatial configurations are the first attempt to intertwine spatial dynamics and computational tools.
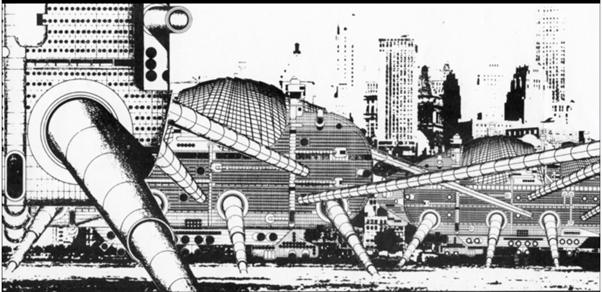
The concept of walking city evoked in the project the plug-in city introduces the dissertation of individual parts of a city wherein the individual units stay within the greater urban context while maintain the ability to morph itself to fit against a variety of setting and its context.
Recent innovations and technological advancements allow us to interpret such concepts with machine learning and cybernetics so explore the possibilities and relevance. Fibernetics mends the fabric of such predecessor to create a such spaces where a kinetic skeleton is being introduced as the structure with interactive aspects and the swarm of robots as its root. The swarm merely acts as a resultant while contributing to the broader intelligence while being maintained as an individual unit. This emphasis the scalability of the such system which can be incorporated from internal configurations to every level of urban system. Such sophisticated system marks the intelligence of spatial cognition while maintaining its adaptive quality it amplifies the ability of the space to learn and predict the desired configuration by prediction model.
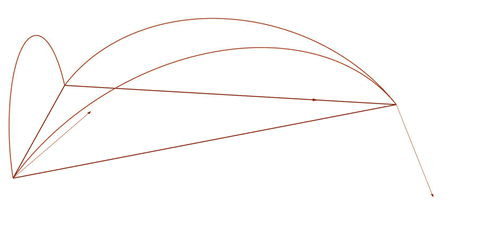
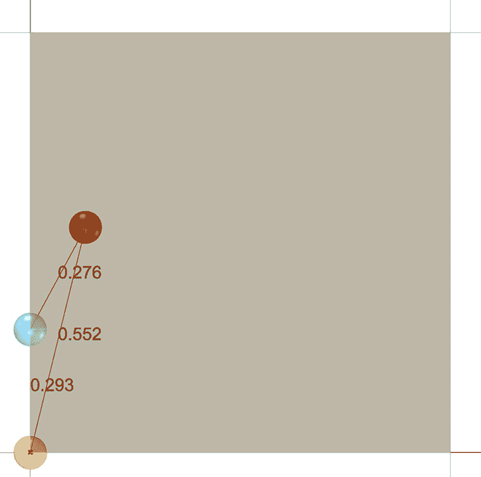
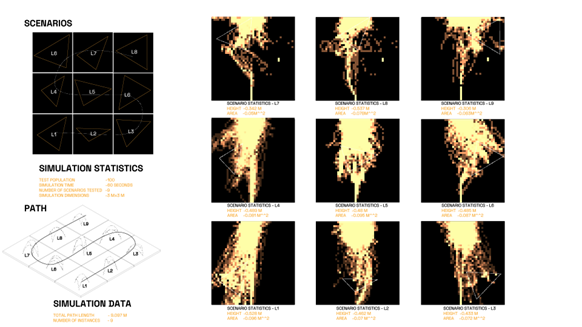
A 1000mmx1000mm space have been designed as the prototype testing space where the basic robot with primitive movements receives its inputs from a resultant from a computational simulation. The simulation where there are 3 such robots connected with a tensile member as a representation of a structural membrane in a kinetic shell. The resultant location is a product of pedestrian simulation, radiation data and real time monitoring of the space.
A scenario of such testing bed has been setup so that the project can grow. When the robot size has been finalized considering its physical size, the limits of its proximity come from the tensile material’s physical attributes. This determines the range within which the robots can move with respect to each other’s location. This range is simulated in grasshopper and simultaneously sent to the physical prototype to replicate the movement in real time in physical realm, whereas the only difference is that the physical model is the primary robot and the secondary and tertiary robots exits in the digital form.
The movement directly correlates to simulations ran through computational tools based on space syntax concepts applied in pedestrian movements. Building on from that is to include the aspect of thermal comfort such that the space height is actively optimizes itself to accommodate the pedestrian movement and radiation data being the core logic applied which tries to spread the base of the pavilion space as much as possible to provide adequate space for the people with the calculation basis being provided with accordance to basic standards while trying to optimize the space for in terms of thermal comfort which lies on the other end of the spectrum. These data latter inform the machine learning algorithm to produce the predictions without the need to actually draw from new data or to connect to such systems to get new data but to merely the effectiveness of the output to its current configuration.
Such setup once connected with its other such members collectively creates a wide range of spaces with wide range of scale which can collectively contributes to the network of system which in turn can reconfigure itself endlessly for effectively all available functions and transact data within the network and thus producing a collective smart system which is capable of self-monitoring and inform each other with high precision to adapt to various set of functions.
4. Space Syntax
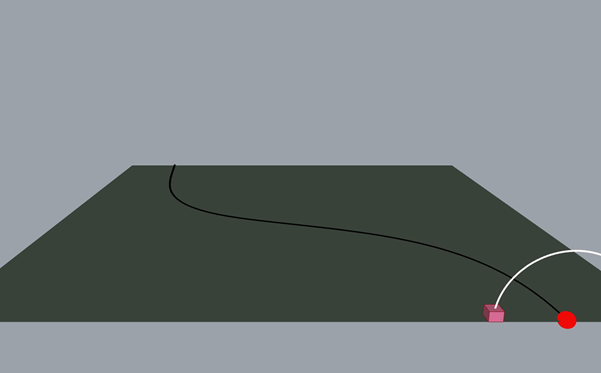
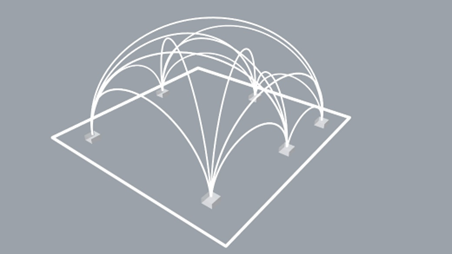
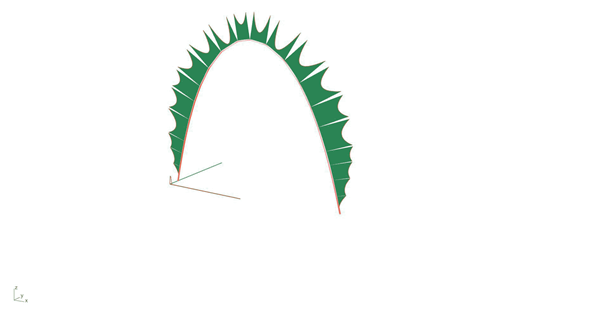
Test space have been analysed using pedestrian simulation plugins for the initial data, so that the defined robotic movements are within the feasible proximity and behaves as we expect. The simulations test and analysis all the possible ranges and locations. Such visualizations aid us in understanding and analyses the system before being employed autonomously.
Pedestrian movement simulations based on different pavilion locations within the defined space
The pedestrian simulation builds up from the core concepts of space syntax, the equally contributing radiation analysis plays a role in the determining second and third plausible location which in turn defines the final form. The distance between the points directly relates to the volume of the covered space as it optimizes the most favourable configuration with respect to thermal comfort.
5. Material Aspect
The project hinges around the concept of bridging kinetic architecture with cybernetics, with the core elements being tested with appropriate material.
- Plastic stick
- PVC pipe
- Acrylic pipe
Tensile plastic stick of 2mm diameter,
hollow PVC pipes of 6mm and 8mm diameter and
lastly hollow acrylic pipes of 6mm and 8mm have been tested as the beam member in the prototype testing
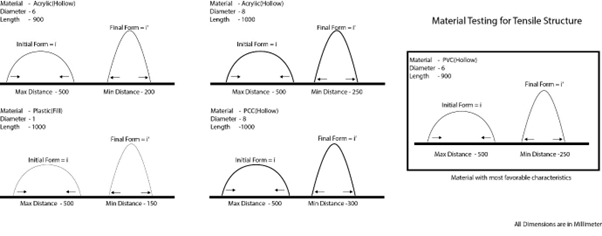
From the test of the above stated materials certain conclusions were derived with respect to rigidity and breaking distances of such material. The material with higher thickness tends to have a shorter range of movement which is roughly 20% lesser than its thinner counterpart with homogenous material.
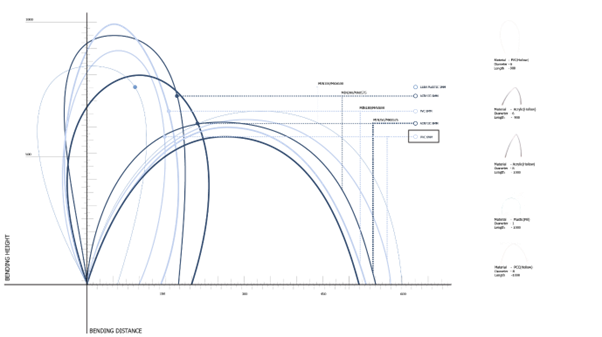
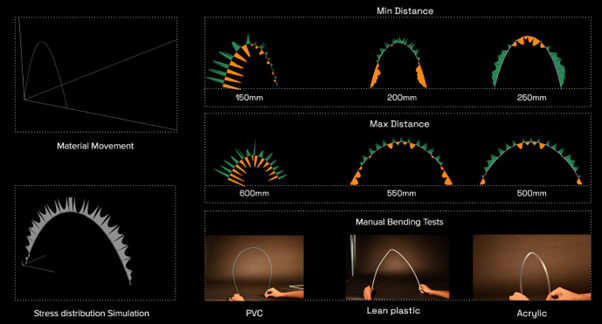
From these suitable material with most desirable properties were selected and incorporated to the physical model and considered for further simulations and developments of the project.
6. Machine Learning Integration
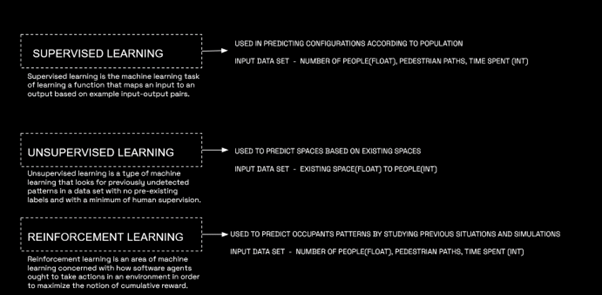
The project indulges the aspect of machine learning which is one of the most recent and most significant contributors to design practice. The initial data sets being all the simulations and analysis such that the algorithm predicts the desirable configuration before the actual appropriate scenario conceives and only tests its predicted model with the data once such moment forges only to learn for adaptations in the future scenarios.
The integration of advanced algorithm of machine learnings becomes significant especially when the systems scale up. Such integration can aid in efficient functioning of the network of autonomous robots which in-turn contributes to a cognitive intelligence. Appropriate machine learning system will be tested for the initial study purpose with which the system learns efficiently and when the integration is successful further such systems with much sophisticated tools such as neural network and deep learning to enhance with the help of unsupervised learning can be implemented.
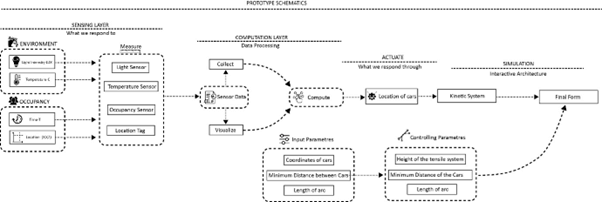
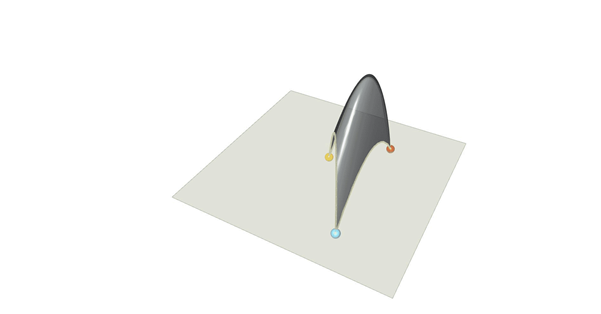
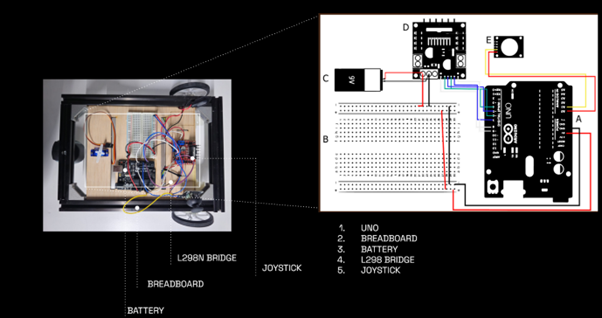
7. Prototype
The digital twin acts as a testing pad and contains the full set of assemblies while the physical prototype emulates the movements to prove its feasibility of project.
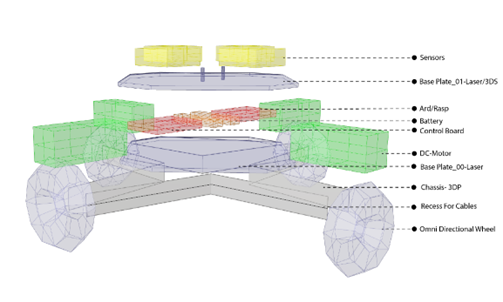
An initial study of the prototype has been conducted to understand with the basic component required and to tests the frame structure and composition of all the components related to sensing layer and actuating layer.
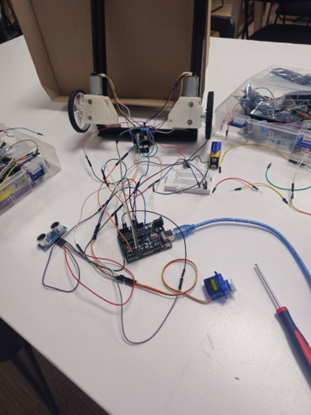
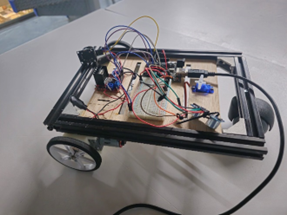
The simulations thus help us understand the compound movement of the prototype while the still being a tangle emulator of its physical occurrence.
8. Results
The adaptive spatial configuration provides us with numerous findings to analyse and improvise with precision to implement the improvised project in a wide array of projects. The scale and function dictate the formation of such system and the machine learning algorithm helps the system reach the desirable configuration and how it should be achieved.
9. Discussion
The design system with such adaptations serves in array of projects, which can formulate itself from micro scale while being a part of larger macro scale project, while contributing to such systems. A swarm of such system can aggregate together to form a radically different configuration or a blend between different needs over a large span or disperse into smaller fragments to serve one. It goes from being a isolated autonomous entity to an completely coordinating, spatially cognitive intelligent system and contribute to various urban context with better data collection and further evolution.
10. Conclusion
Fibernetics acts as a initiative to treat spaces that can be responsive to a collection of variables such as occupants, functions, environmental data. By introducing the kinetic system and cybernetics into a mix with user centric design formation, it implies to build significance to spatial dynamics moving part flexibility and multipurpose which often celebrated as heroes of efficient use of space. Fibernetics intend to extend its use in multitude of scope such as taking over different typology of built environment and developing its own ecology of spaces which can sustain itself.