Serial Link
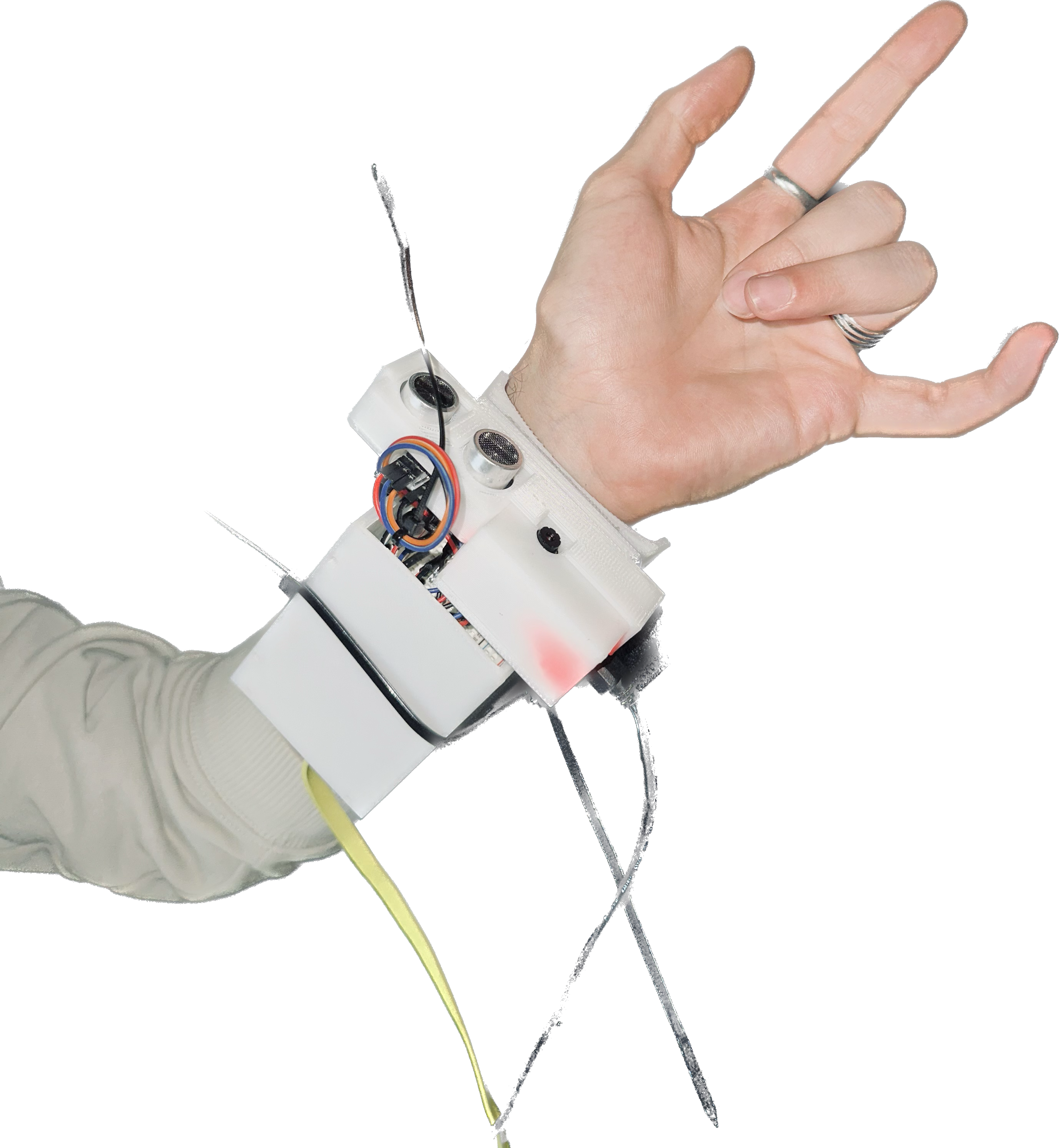
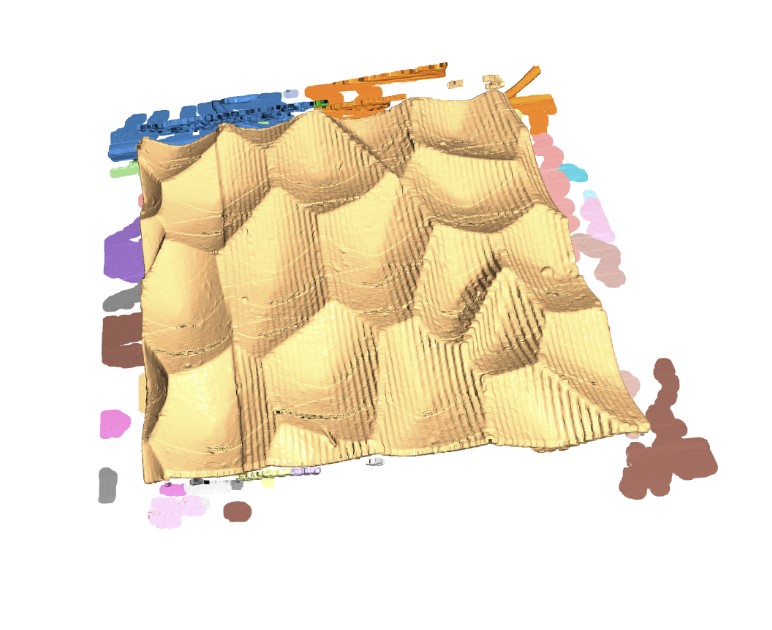
This project explores how serial data written by environmental sensors can control and influence the appearance of digital media. The outcome of Serial Link was a wearable device that incorporates a ESP32, Gyroscope, ultrasonic sensor, and a power bank that can control digital media in touch designer through network access. What is serial data?Utilizing the … Read more