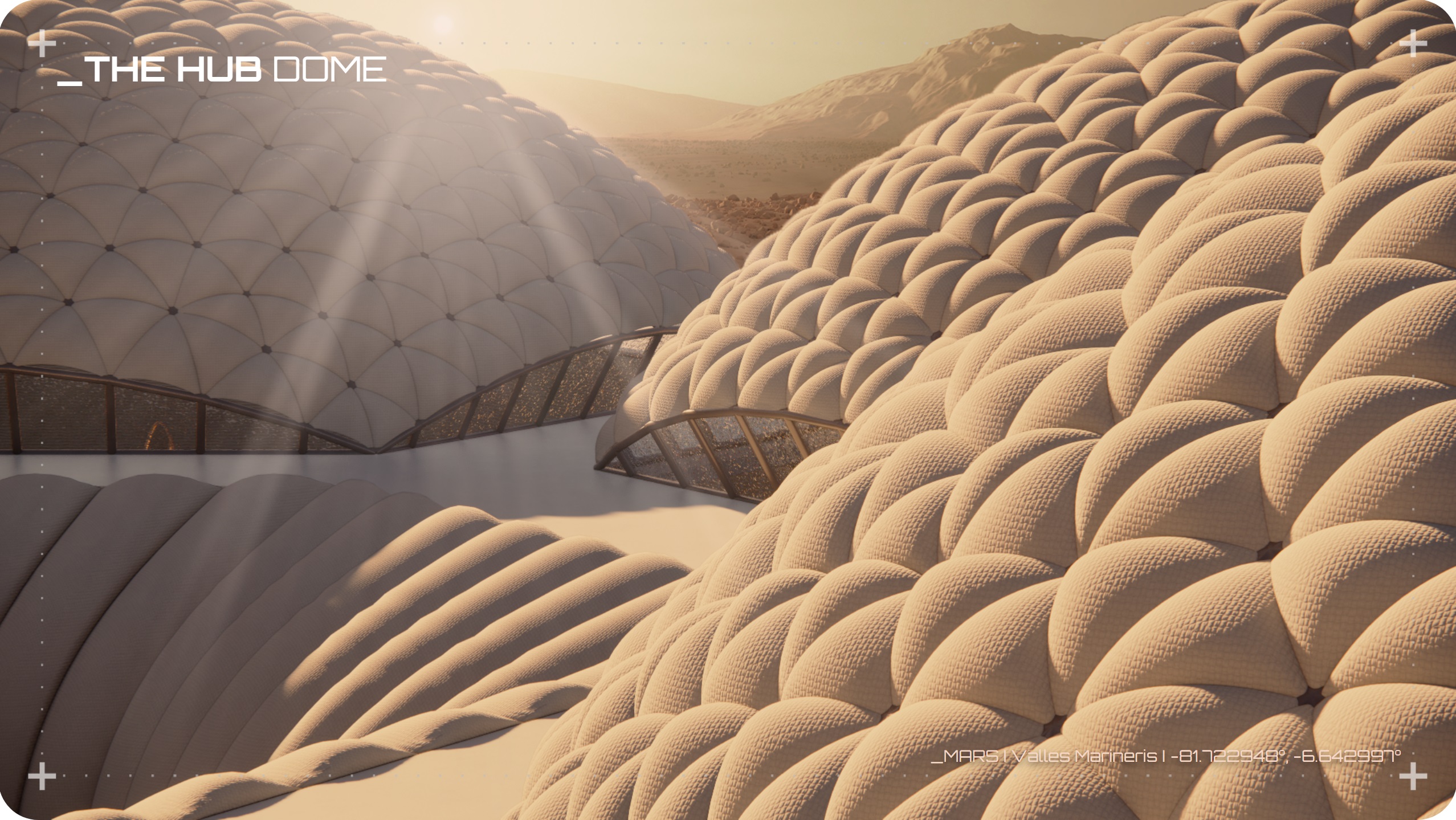
Reimagining a Human Settlement on the Red Planet
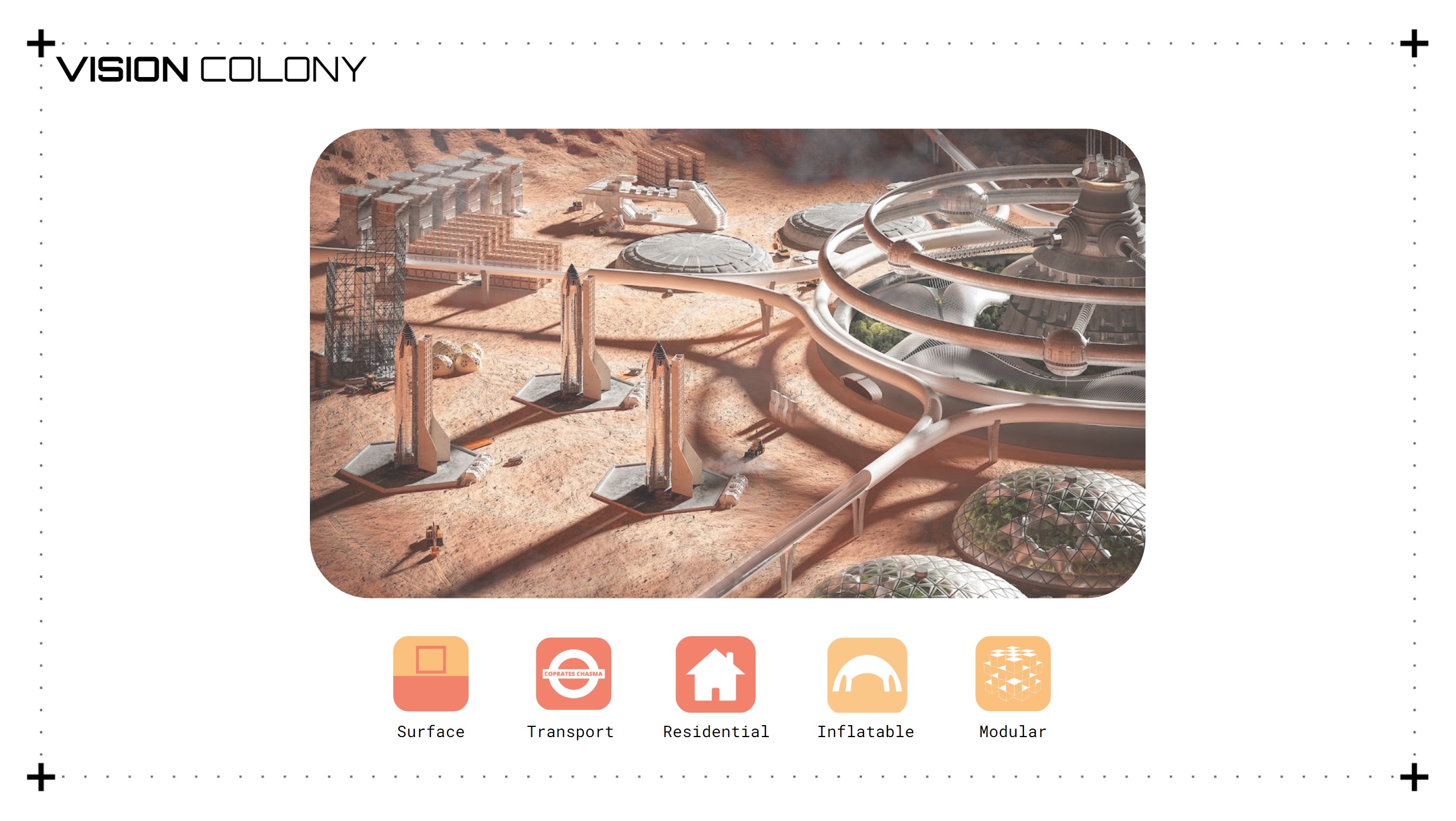
Envisioning a self-sustained colony on Mars, our primary focus is on revolutionizing transportation within the red planet. Sustainability is our guiding principle as we design an efficient transportation system that seamlessly connects habitats across various clusters. Incorporating Tensegrity moving parts, Inflatable lightweight structures, and a Hexagonal Grid framework, our approach embraces a Kit-Of-Part methodology. Following this repeatable hexagonal pattern, all design elements can be easily connected with each other like a puzzle – in every possible direction – creating a seamless enclosed network for living and exploring a new habitation prototype on Mars.
Our transportation infrastructure relies on tensegrity moving parts for lightweight and durable launching pads, ensuring safe landings in Martian environments. Inflatable lightweight modules offer structural integrity and modularity, while the hexagonal grid optimizes space utilization and connectivity across the Martian surface. This adaptable framework accommodates diverse functions within each module, enhancing versatility within the colony. By prioritizing modularity and scalability, our hexagonal grid system facilitates rapid assembly, reconfiguration, and infinite expansion. Standardized components and interfaces ensure resilience to evolving needs and environmental conditions on Mars, fostering community and collaboration among colonists. This approach harmonizes with the Martian environment, minimizing terraforming while maximizing efficiency and connectivity. Our system integrates transportation hubs mirroring those found on Earth, facilitating seamless mobility and resource distribution within the colony. Additionally, our efficient transport system, including capsule-based devices for goods and human transit, further enhances connectivity and resource distribution across the Martian landscape. In summary, our approach aims to establish a sustainable Martian colony while minimizing ecological impact and maximizing efficiency in transport and infrastructure.
_MARS Colony
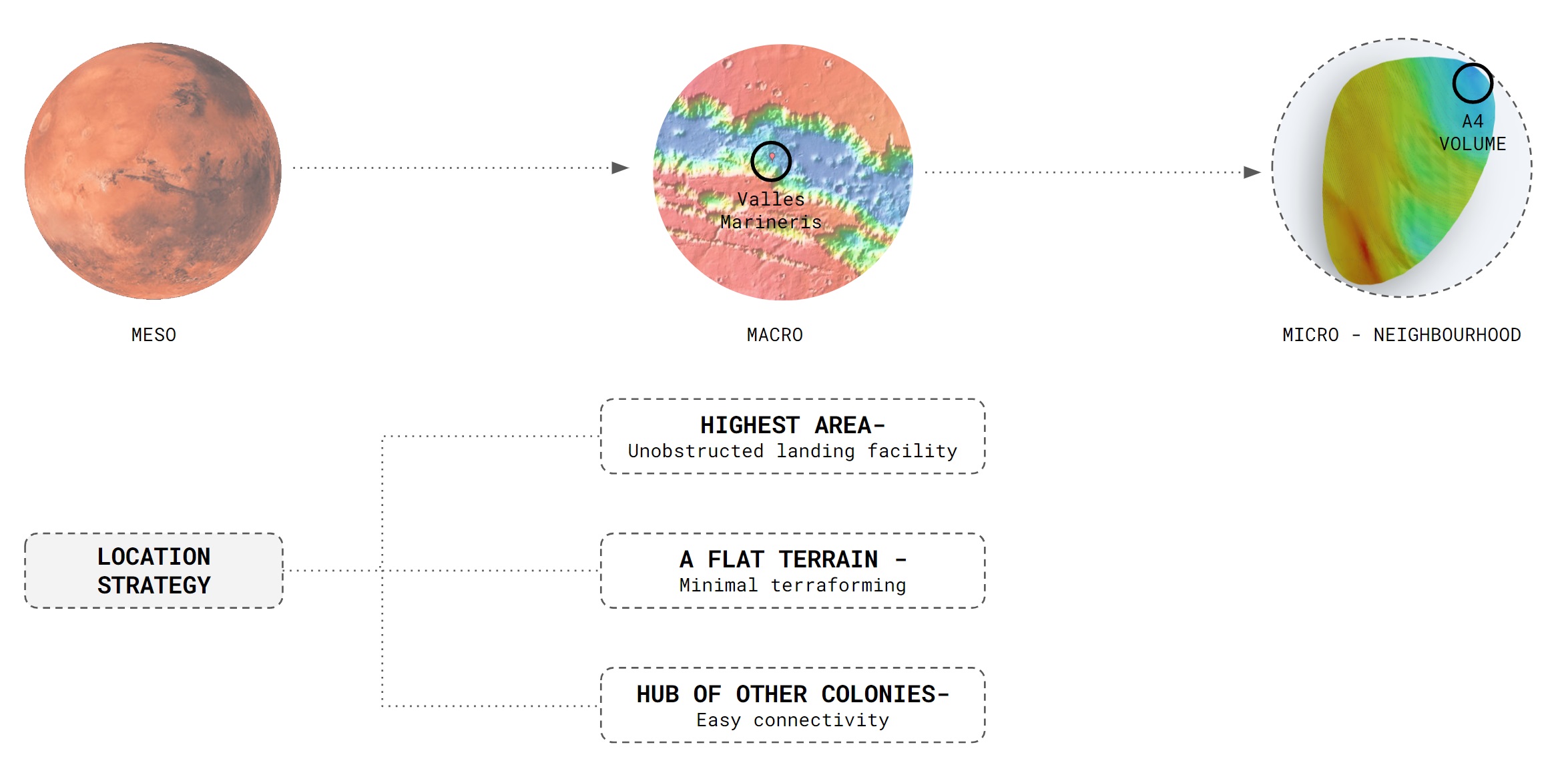
_LOCATION A4 Section
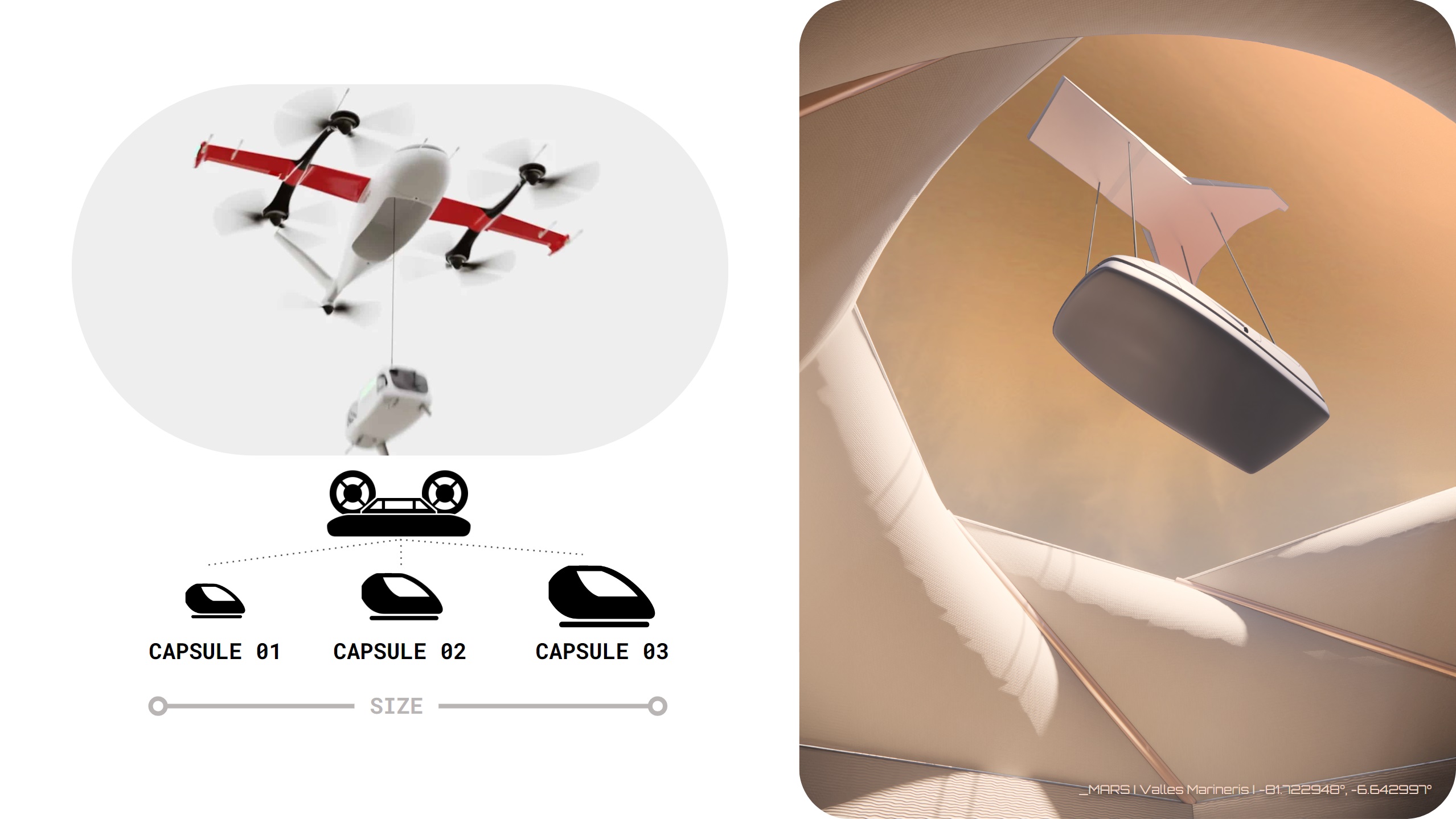
_TRANSPORTATION System
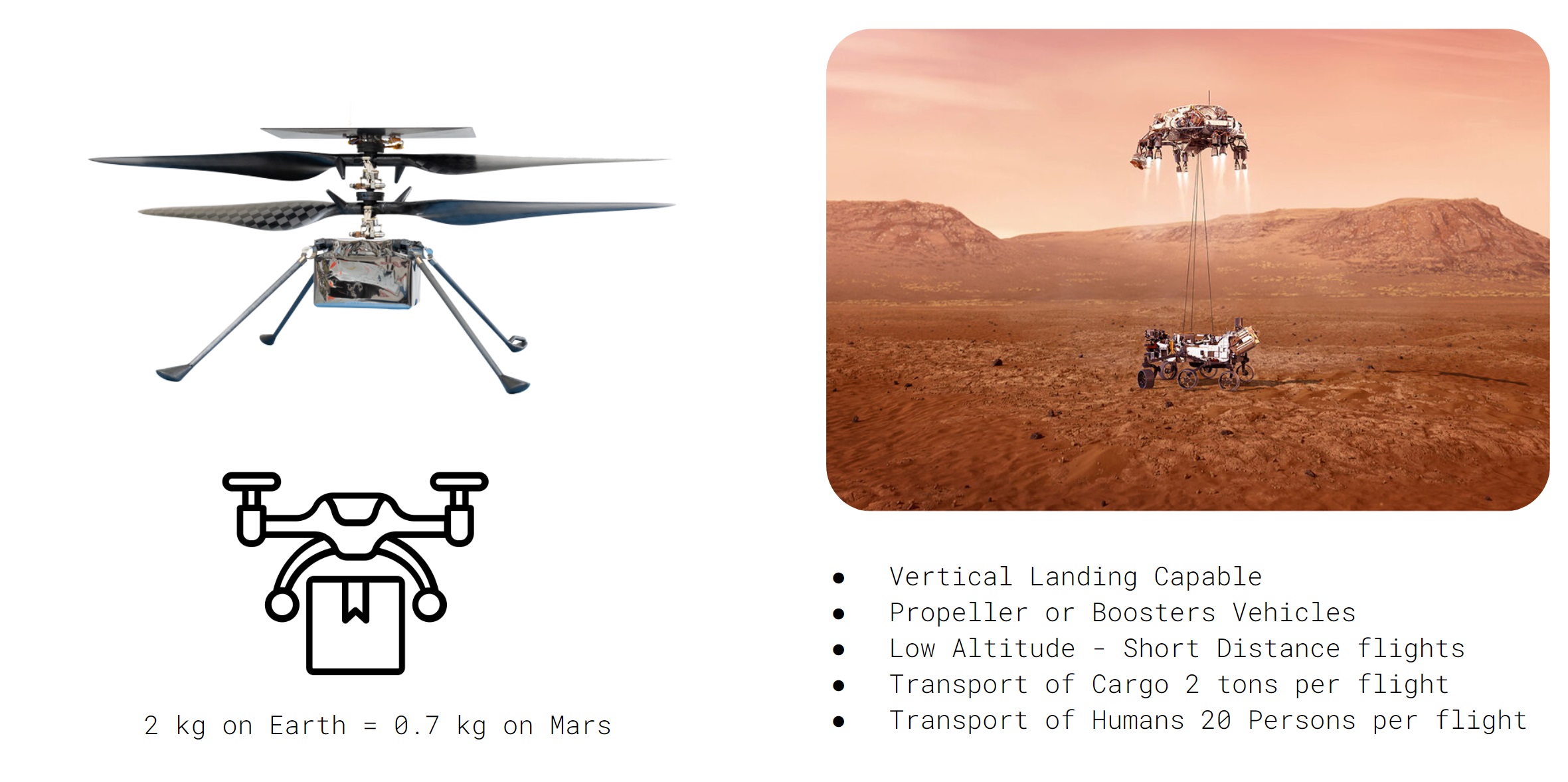
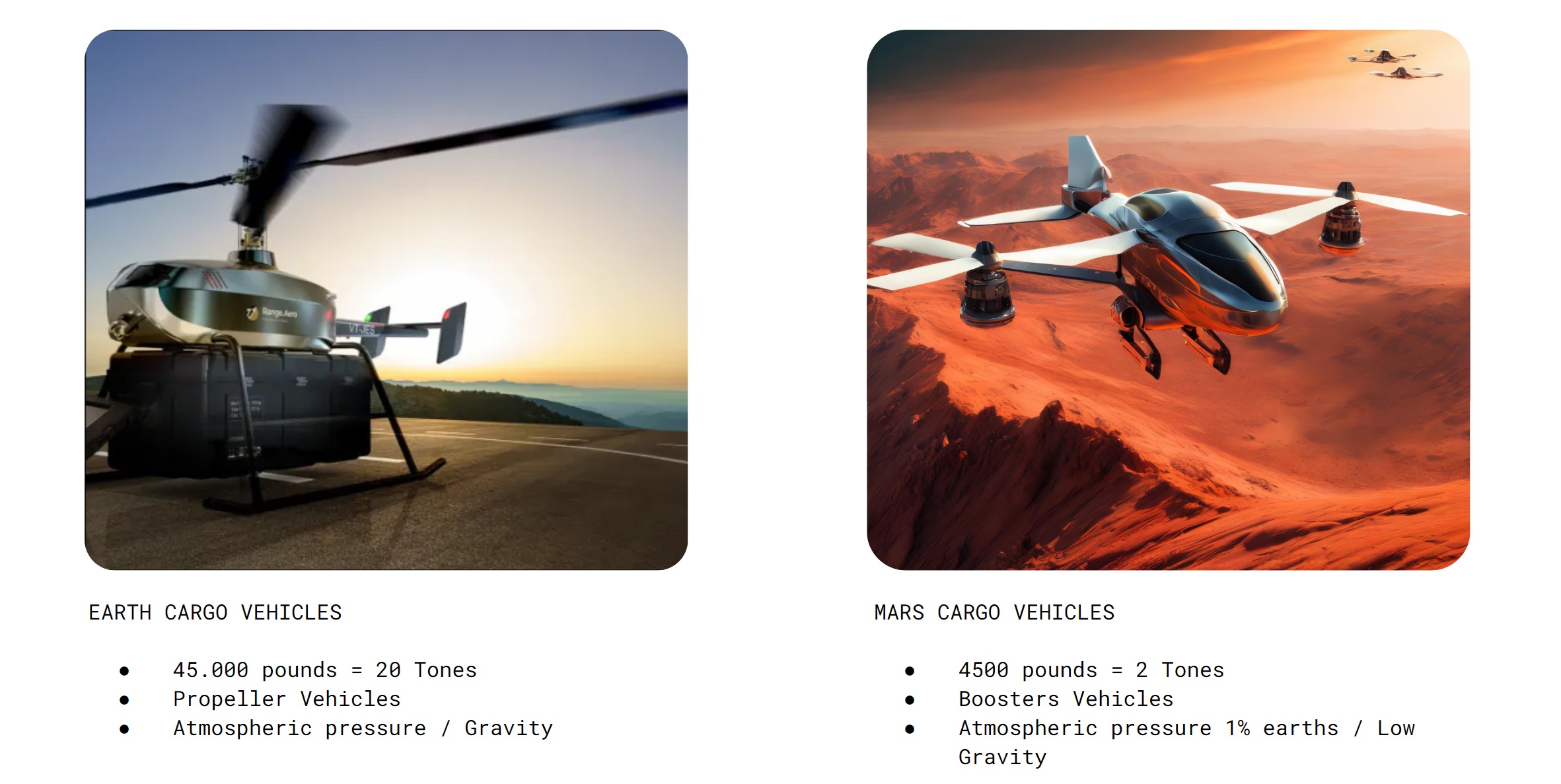
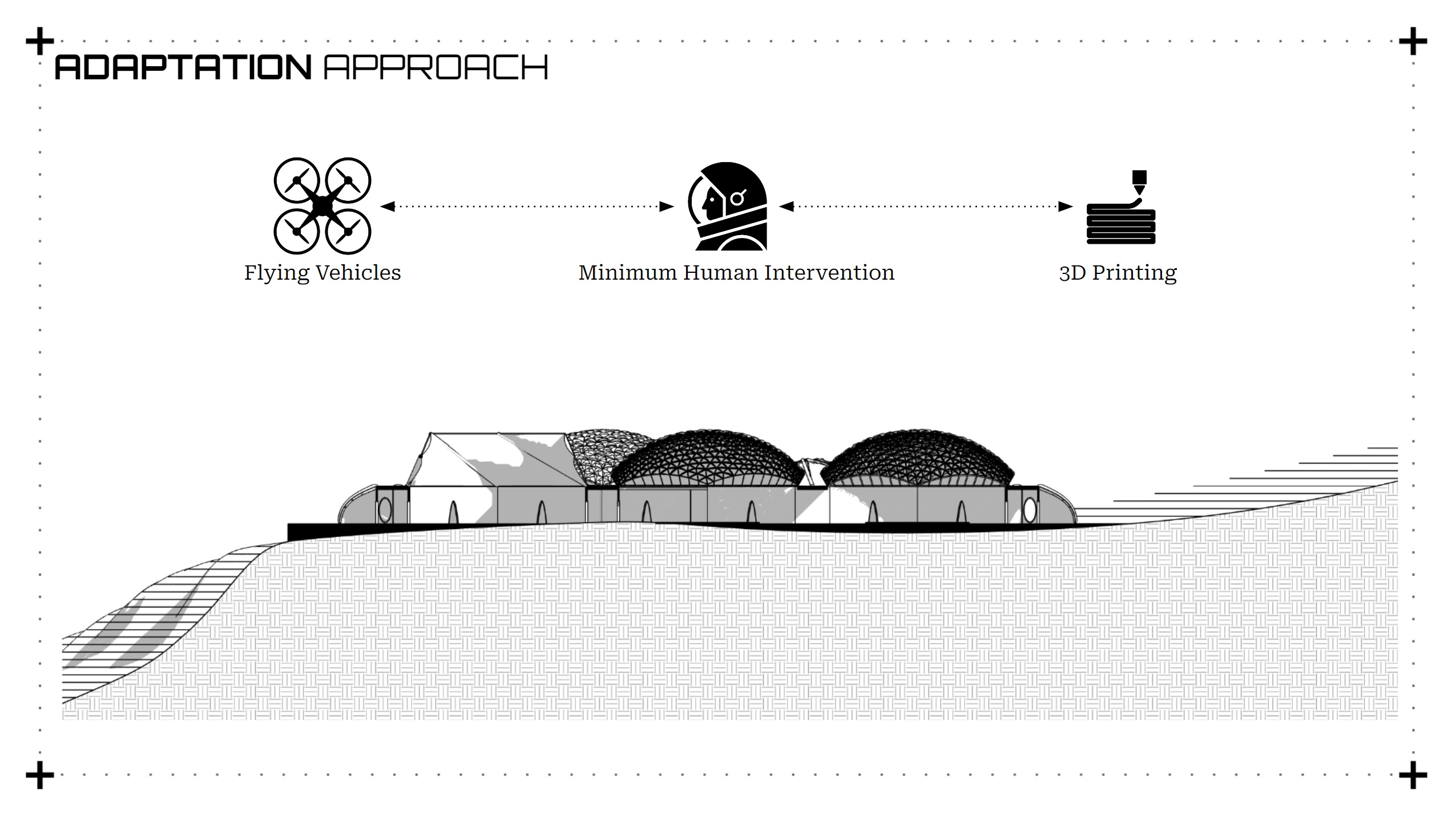
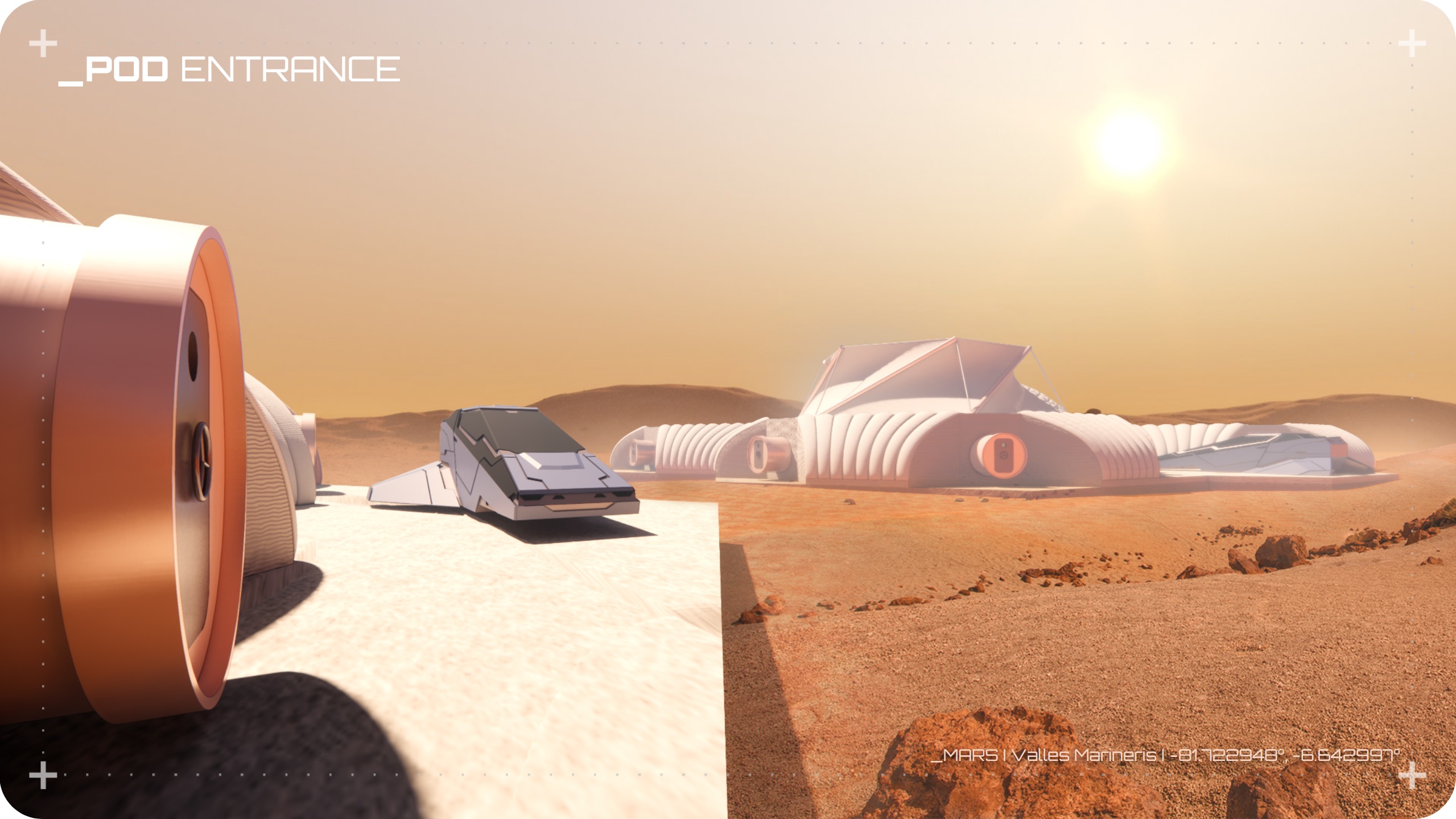
We are envisioning an airborne scenario for our future Martian colony, inspired by the recent successful drone testing conducted by NASA with the Ingenuity helicopter. Our vision includes flying vehicles capable of carrying payloads of up to 2 tonnes, leveraging the lower atmospheric pressure on Mars to achieve this capability. These vehicles will play a crucial role in connecting our colony together, facilitating transportation of small packages, future colonists, and heavy cargo via capsules of various sizes. Operating at low altitudes and covering short distances, these flying vehicles will serve as efficient means of transportation within the Martian landscape. The launching pad is specially designed to accommodate the arrival and departure of these capsules, ensuring smooth and safe operations for inter-colony travel and cargo transport. With this innovative airborne transportation system, we aim to overcome the challenges of Martian terrain and distance.
_AGGREGATION Site Planning
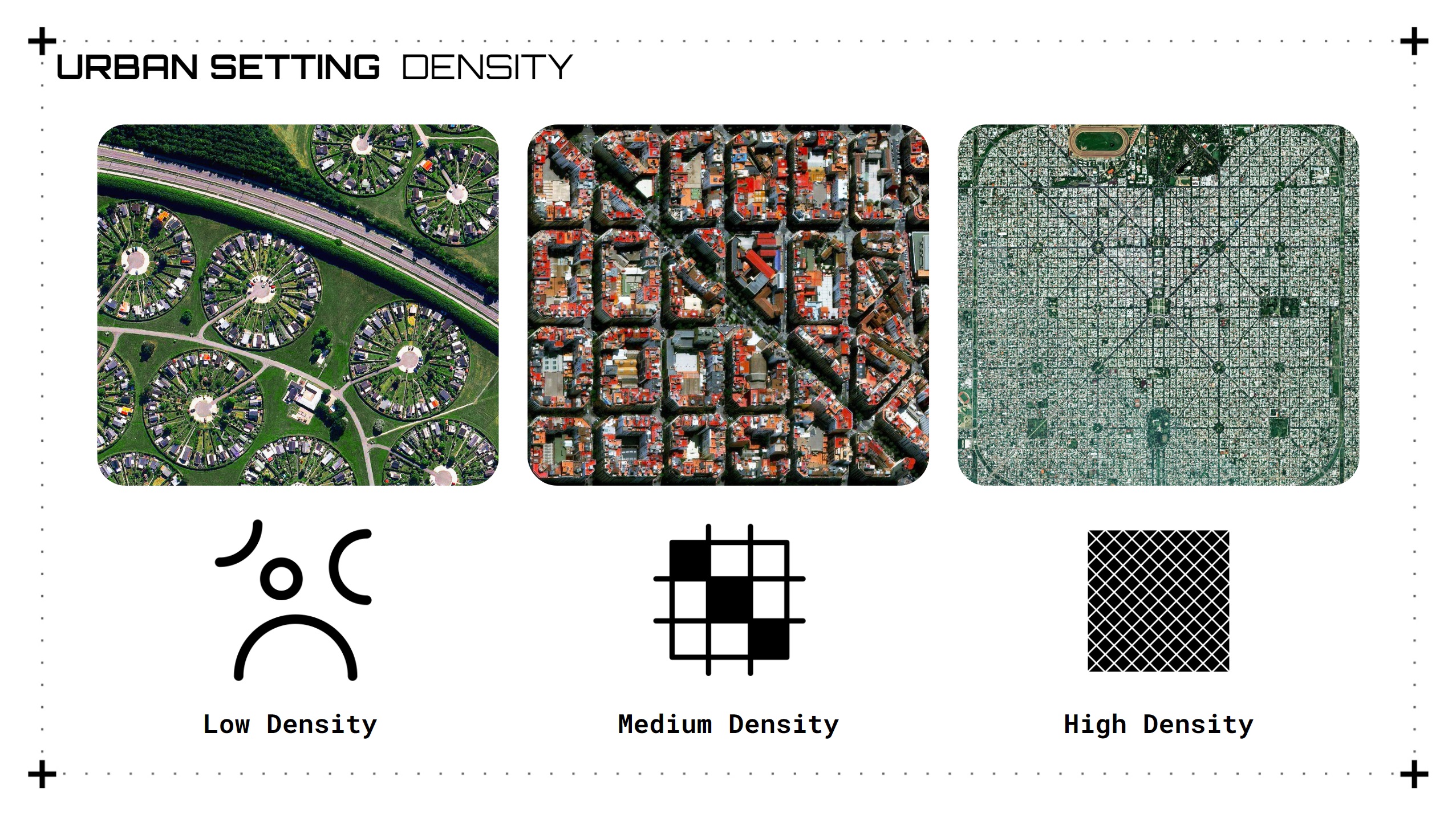
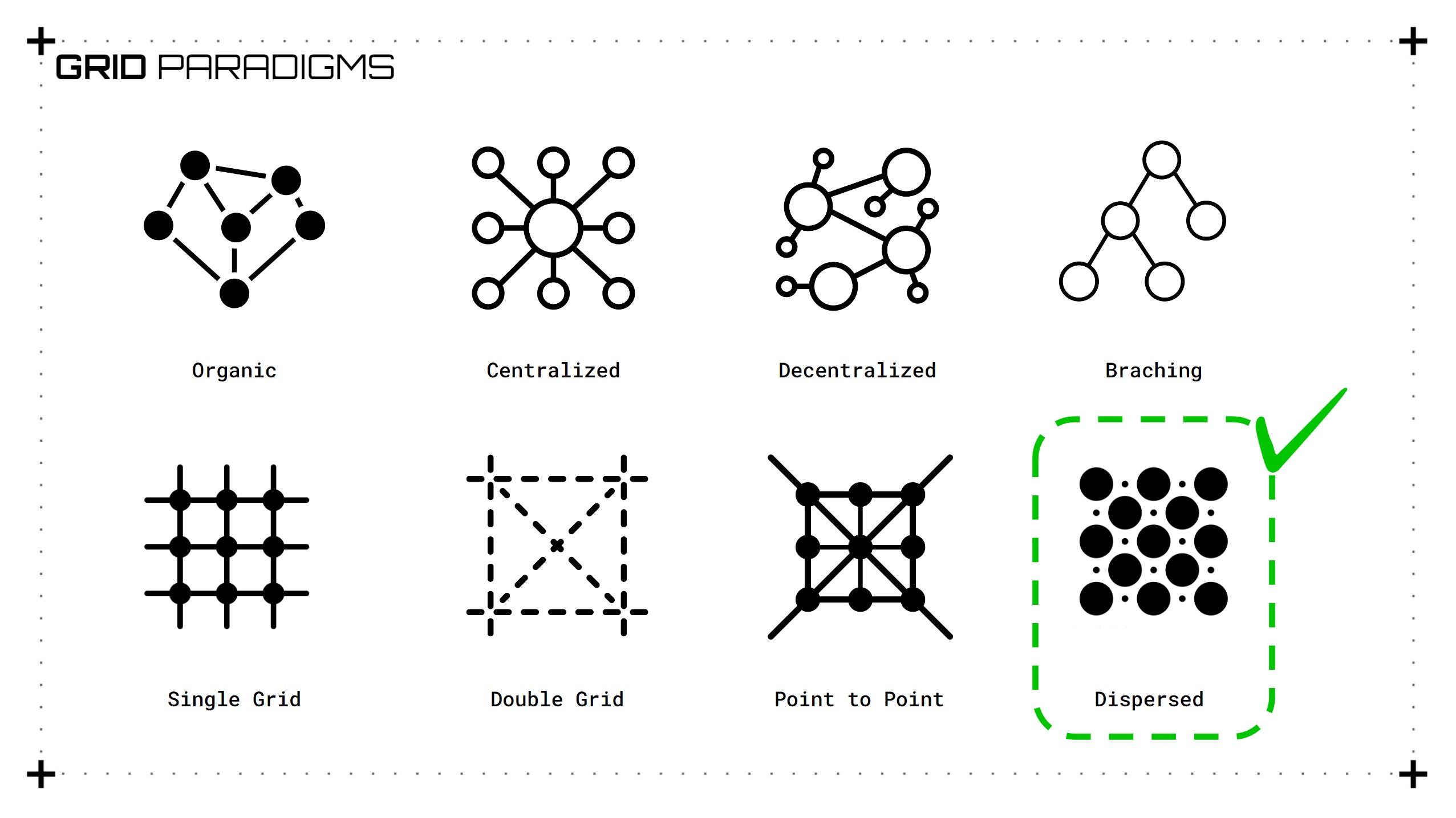
Our colony design journey begins with a thorough examination of urban centers on Earth, assessing different densities and configurations. Opting for a Dispersed Grid layout enhanced by airborne connections, we aim to maximize accessibility and connectivity throughout the colony.
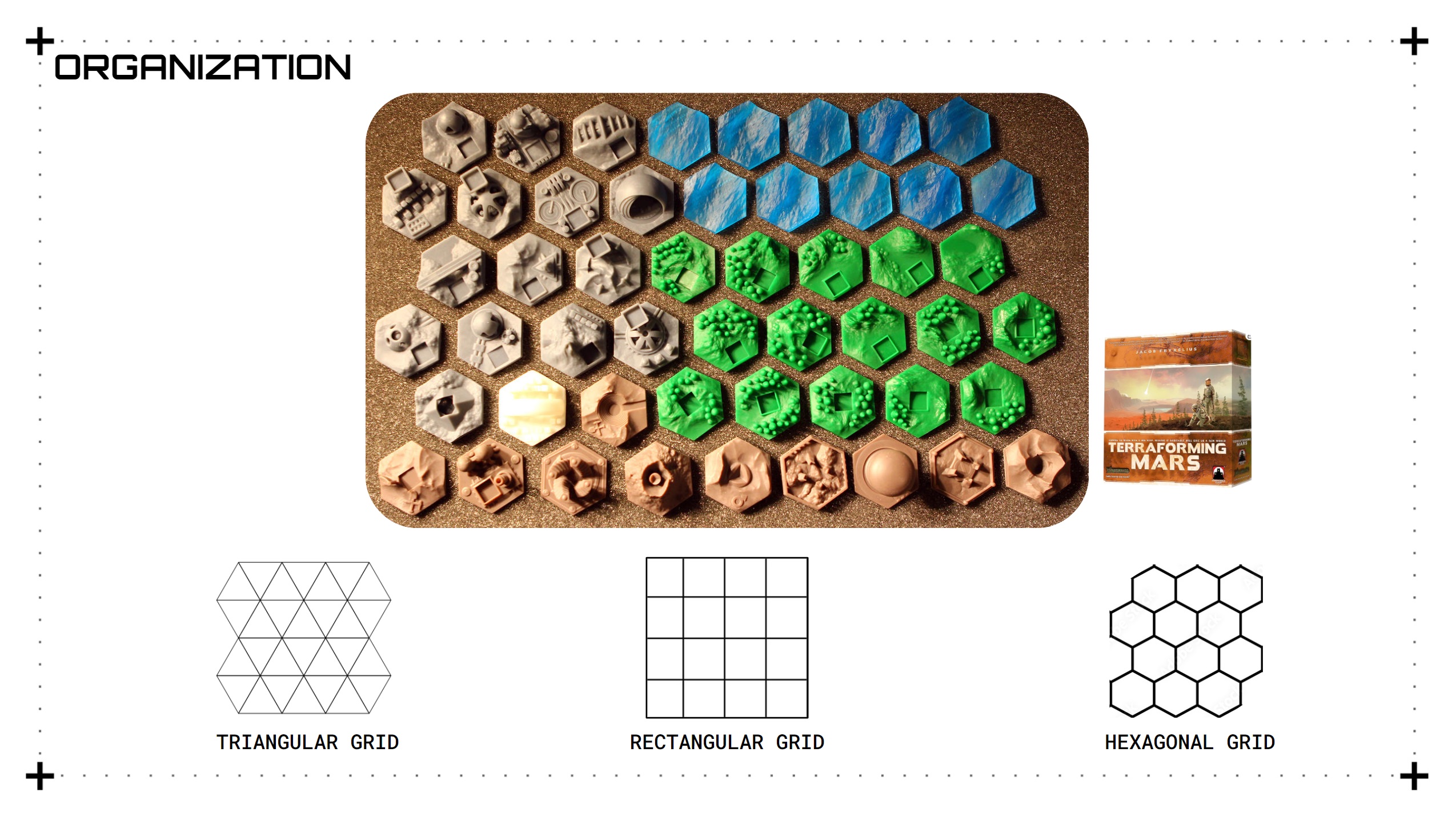
Guided by our research, we experiment with various shapes and arrangements, ultimately settling on a hexagonal grid for its exceptional efficiency in accommodating diverse functions within a repeating pattern. Leveraging tools like Wasp, we craft continuous hexagons with primary axes, resulting in a compact yet functional design.
To address the potential challenges of compacted layouts, we strategically group hexagons, starting with essential elements like transportation hubs and residential clusters, and gradually expanding to encompass the entire colony.
A thorough analysis of excavation and backfilling ensures a surplus of excavation volume, allowing for material reuse in processes like 3D printing and construction, and promoting sustainability in our endeavors.
Our project is structured into three distinct phases, with each phase dedicated to executing one cluster. This phased approach ensures methodical development and implementation, culminating in the creation of a sustainable and fully functional Martian colony.
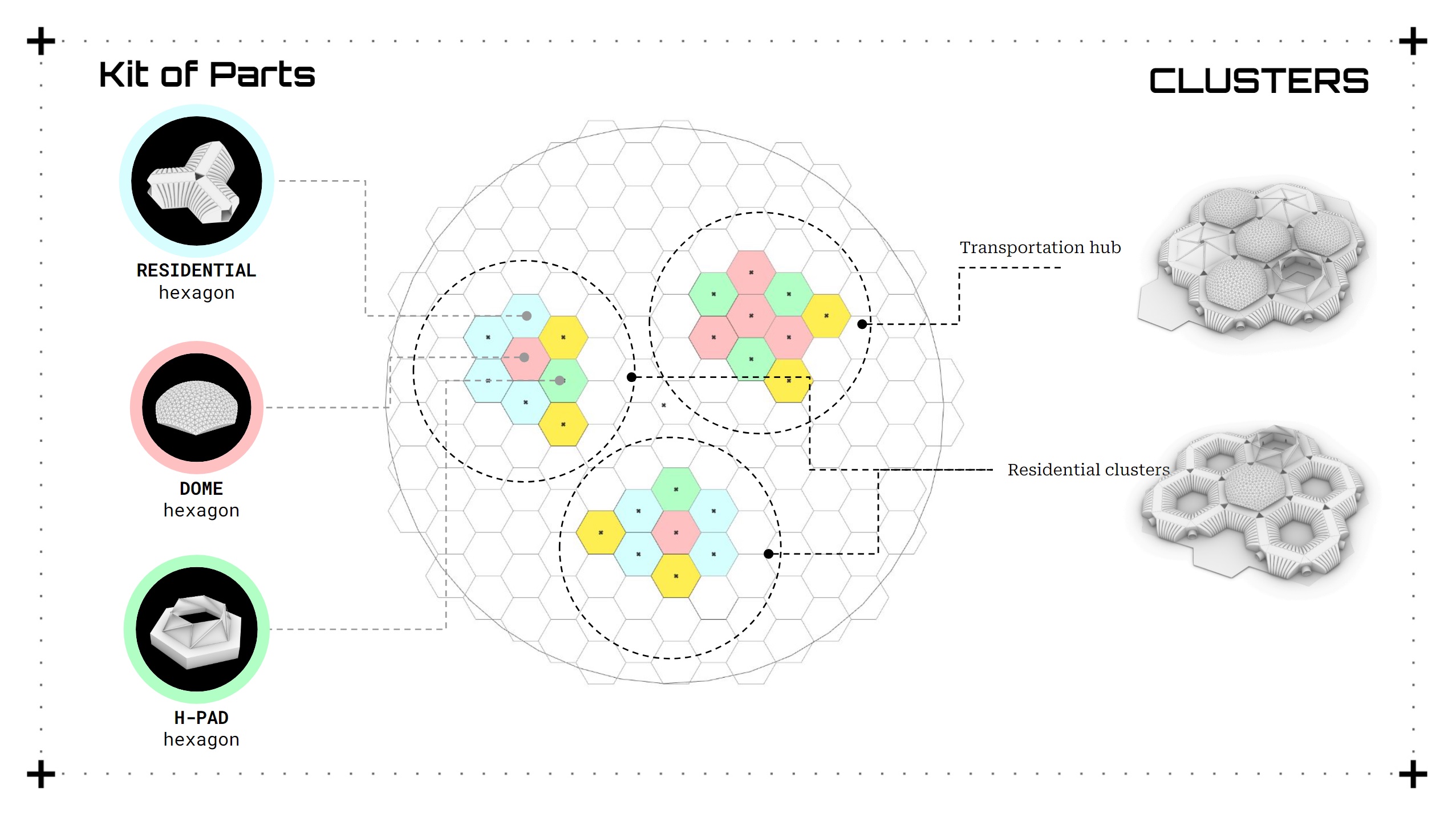
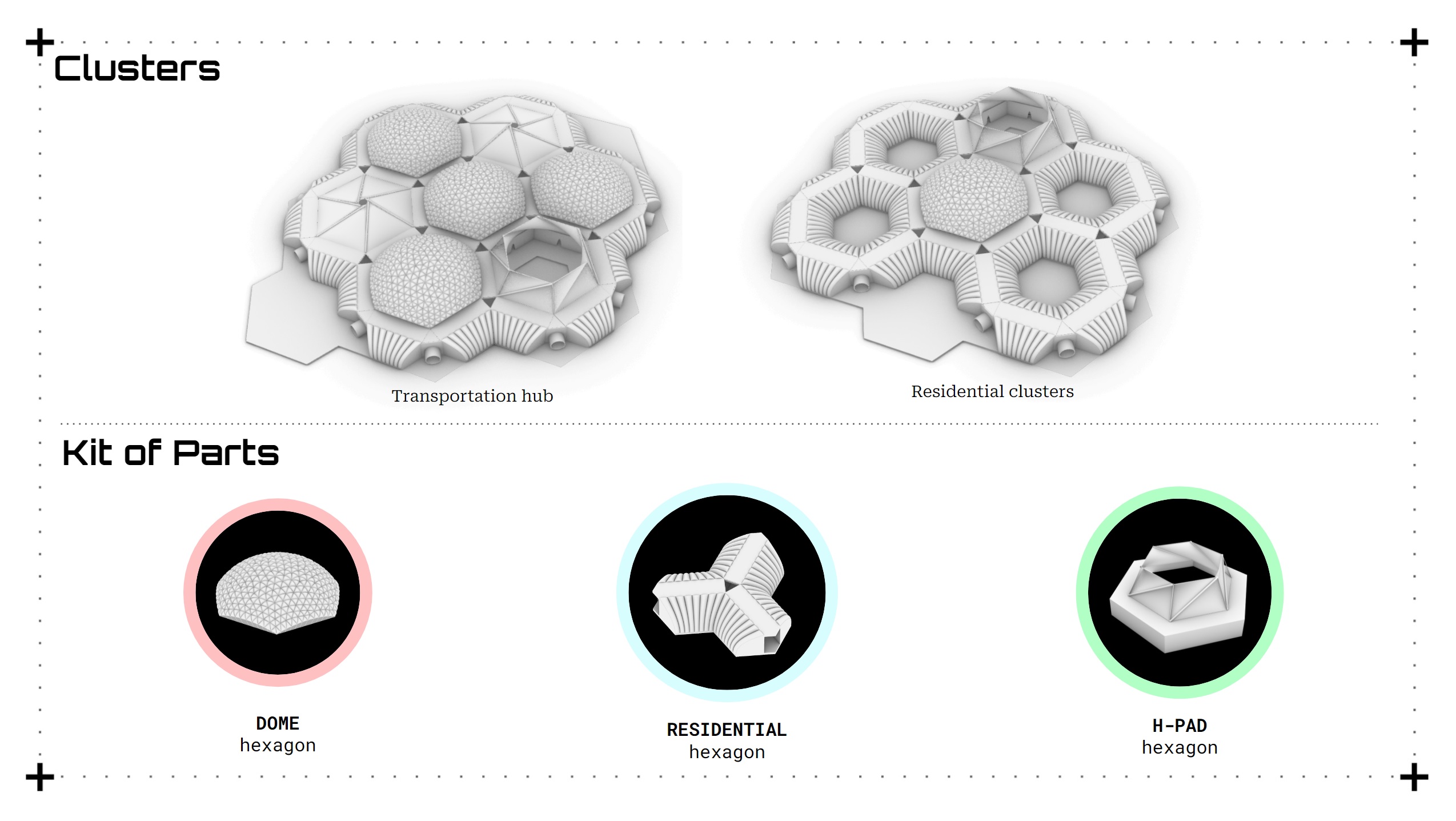
Our project embraces the concept of a ‘Kit Of Parts‘, featuring two distinct cluster types: Residential and Transport Hub. Each cluster comprises three essential design elements – Helipad, Dome, and Residential Pod – strategically distributed based on their designated functions. Utilizing a grid system with replicated forms, we can customize hexagon types to suit specific functions and evolving needs within our Martian settlement.

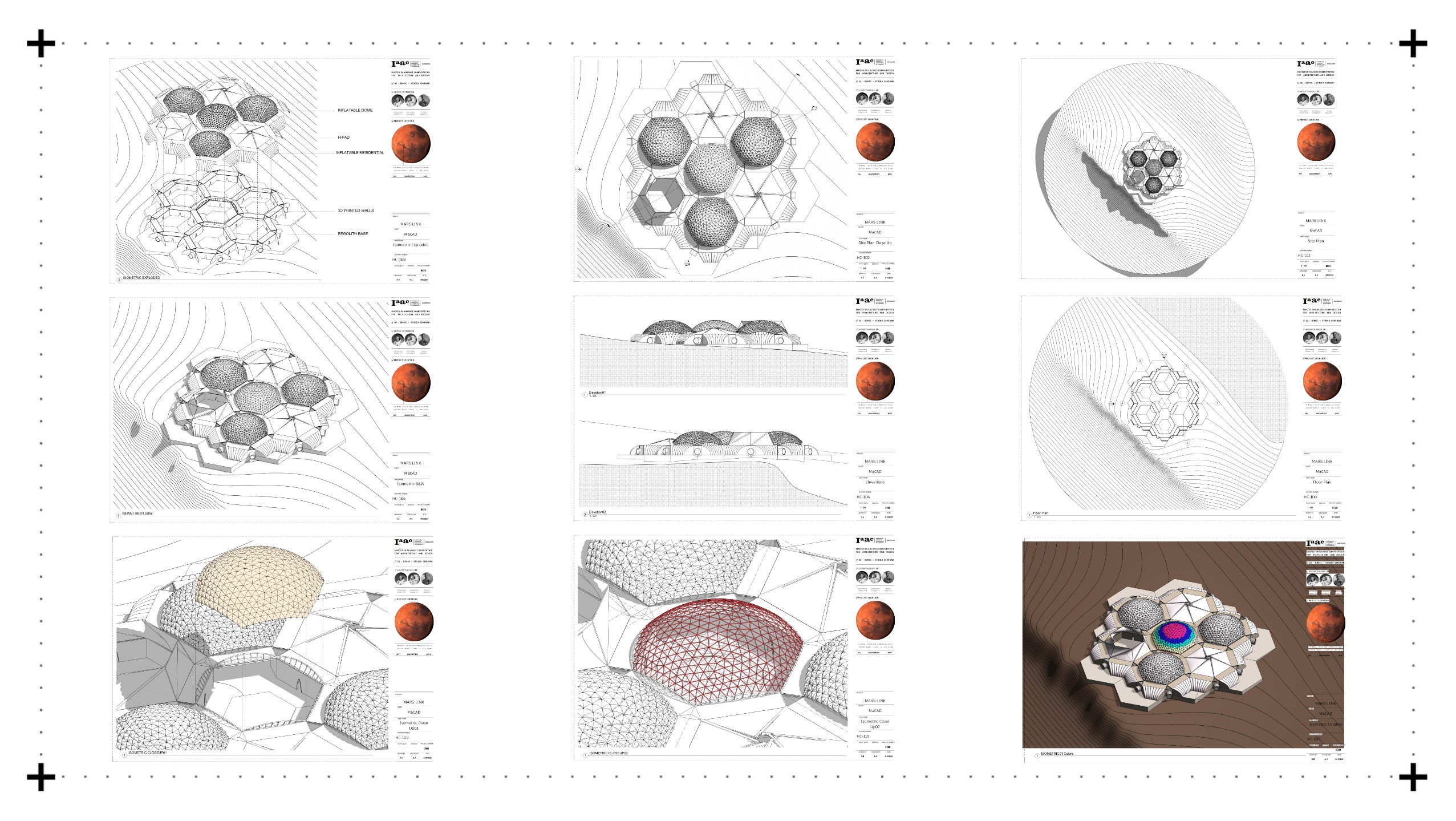
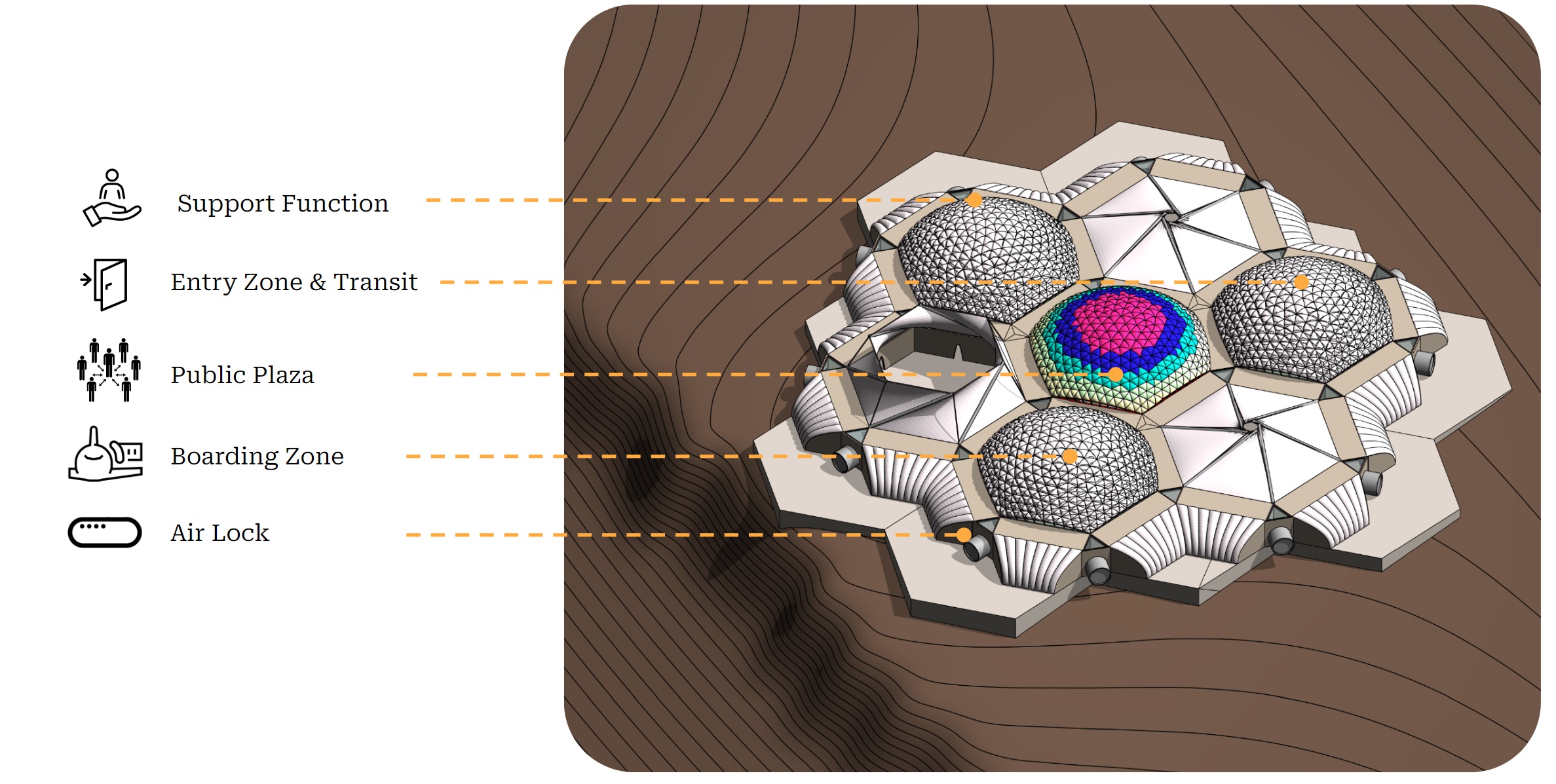
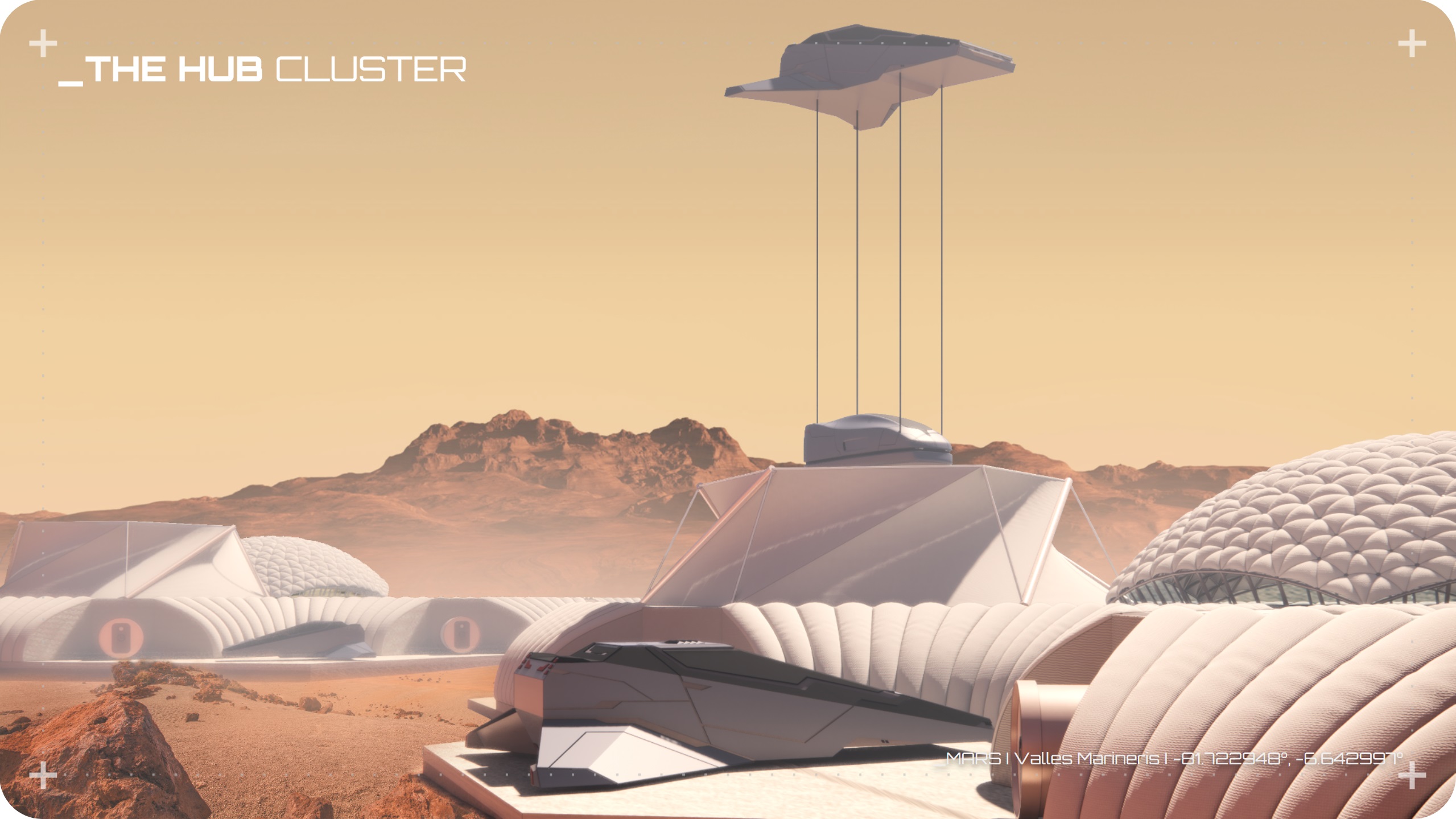
_TRANSPORTATION HUB CLUSTERS
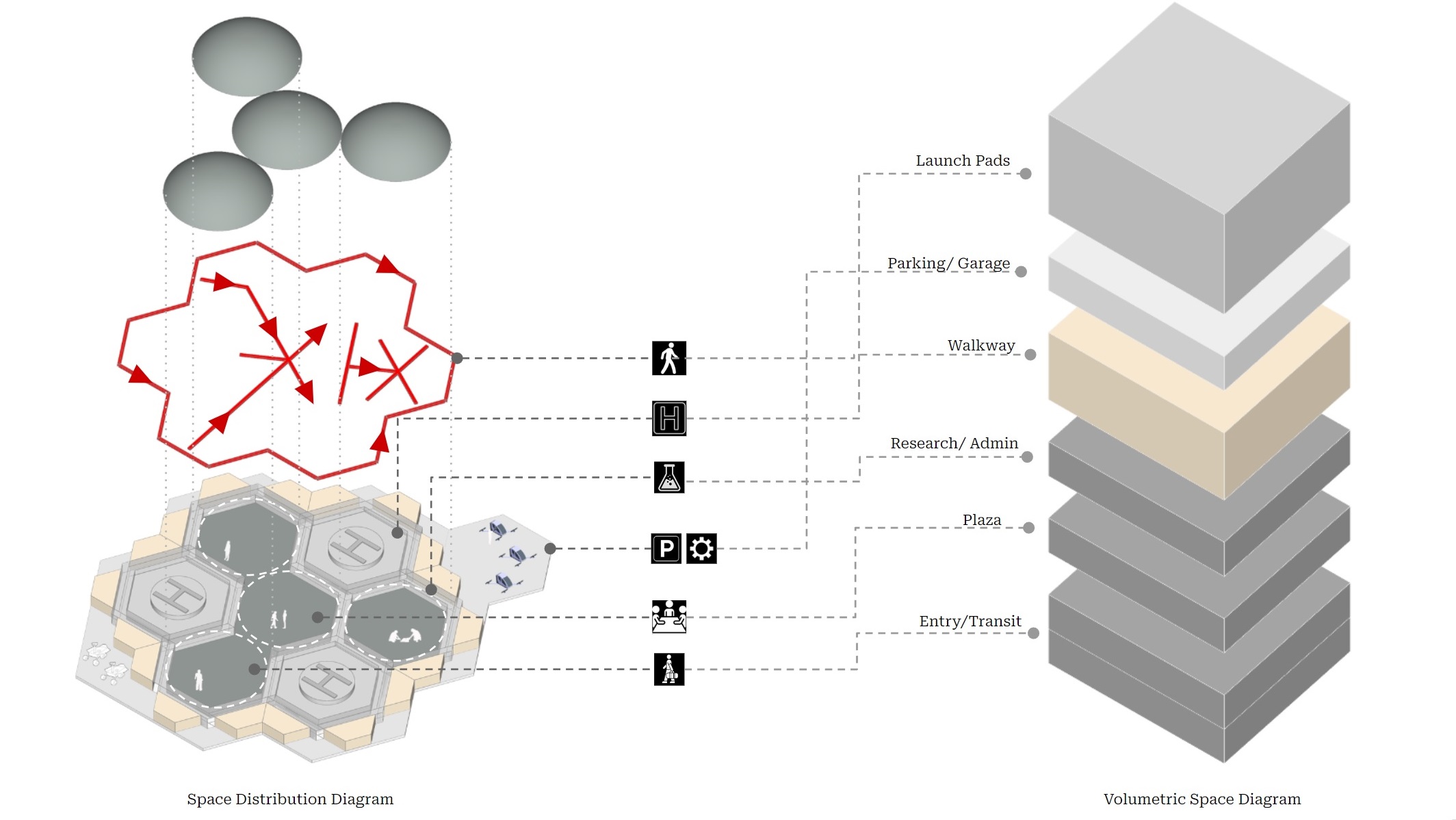
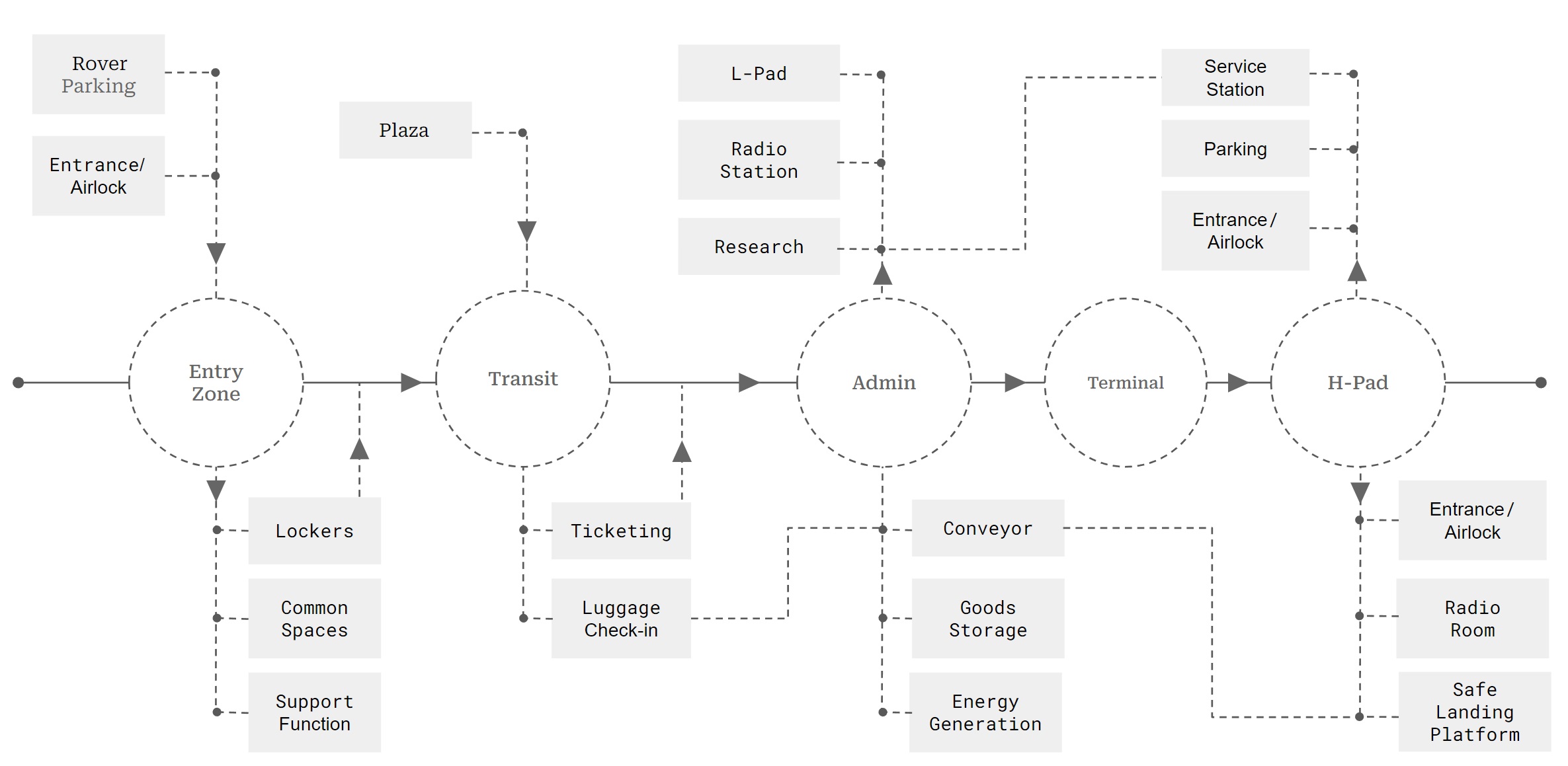
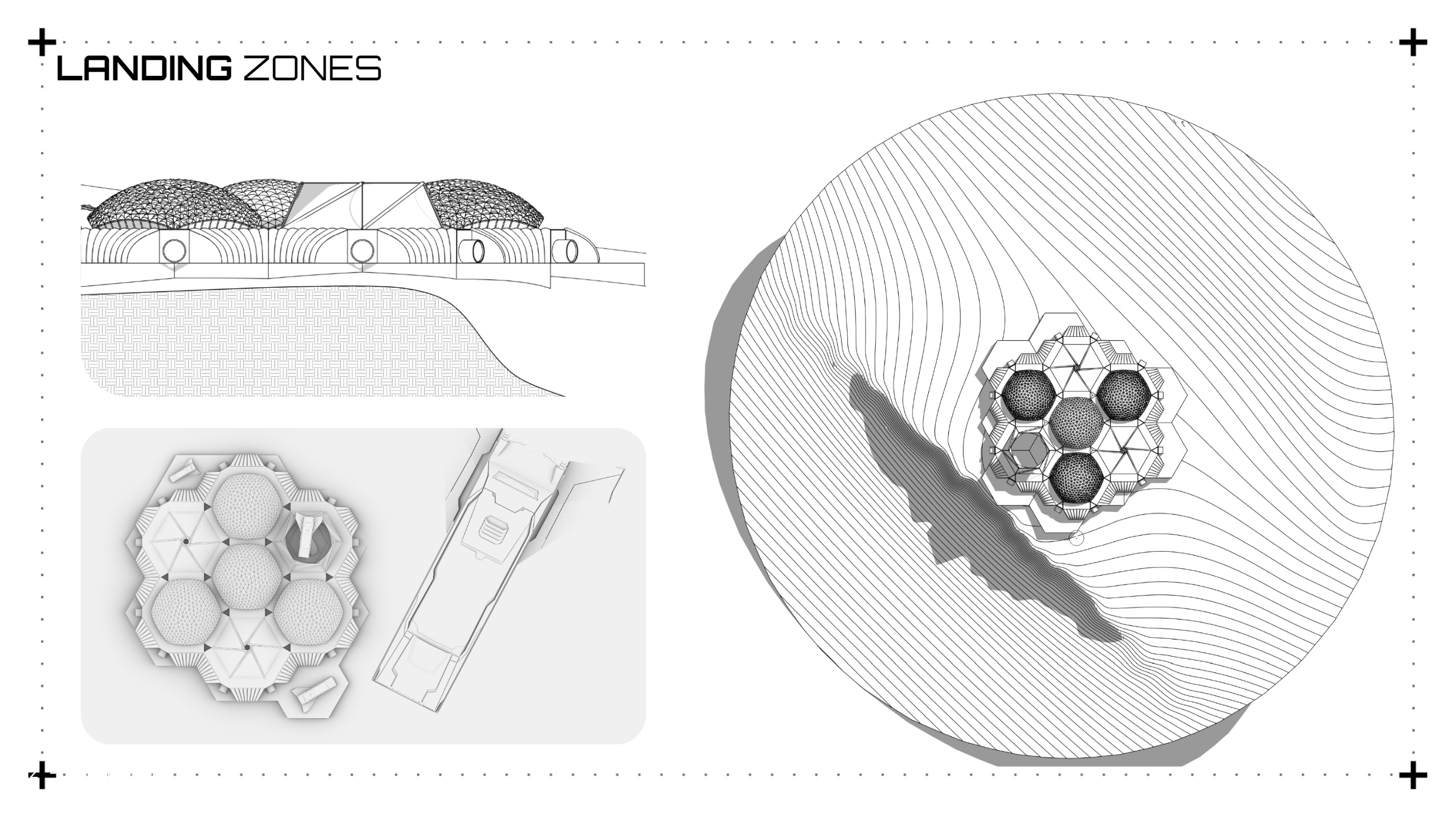
Located at the heart of our Martian settlement, the transportation hub serves as a vital nexus, seamlessly connecting neighboring clusters. Comprising launching pads, airlock systems, transit facilities, a public plaza, and research labs, this central node facilitates movement and interaction among colonists. The hub’s design optimizes functionality, with launching pads situated on the periphery and central domes housing key functions such as the plaza, transit facilities, and research labs. Movement within the hub begins with transit services, progressing from ticketing areas to terminals, culminating at the research launching pads. Peripheral landing zones offer parking and service stations, minimizing human intervention on the Martian surface. The hub’s infrastructure integrates terraforming bases, 3D-printed walls, and structural members supporting the inflated domes, ensuring stability and durability in the harsh Martian environment. Launching pads feature tensegrity moving parts and Pneumatic Membrane coverings, while the central domes utilize a structural framework to support inflatable membranes, providing both functionality and resilience.

OVERVIEW
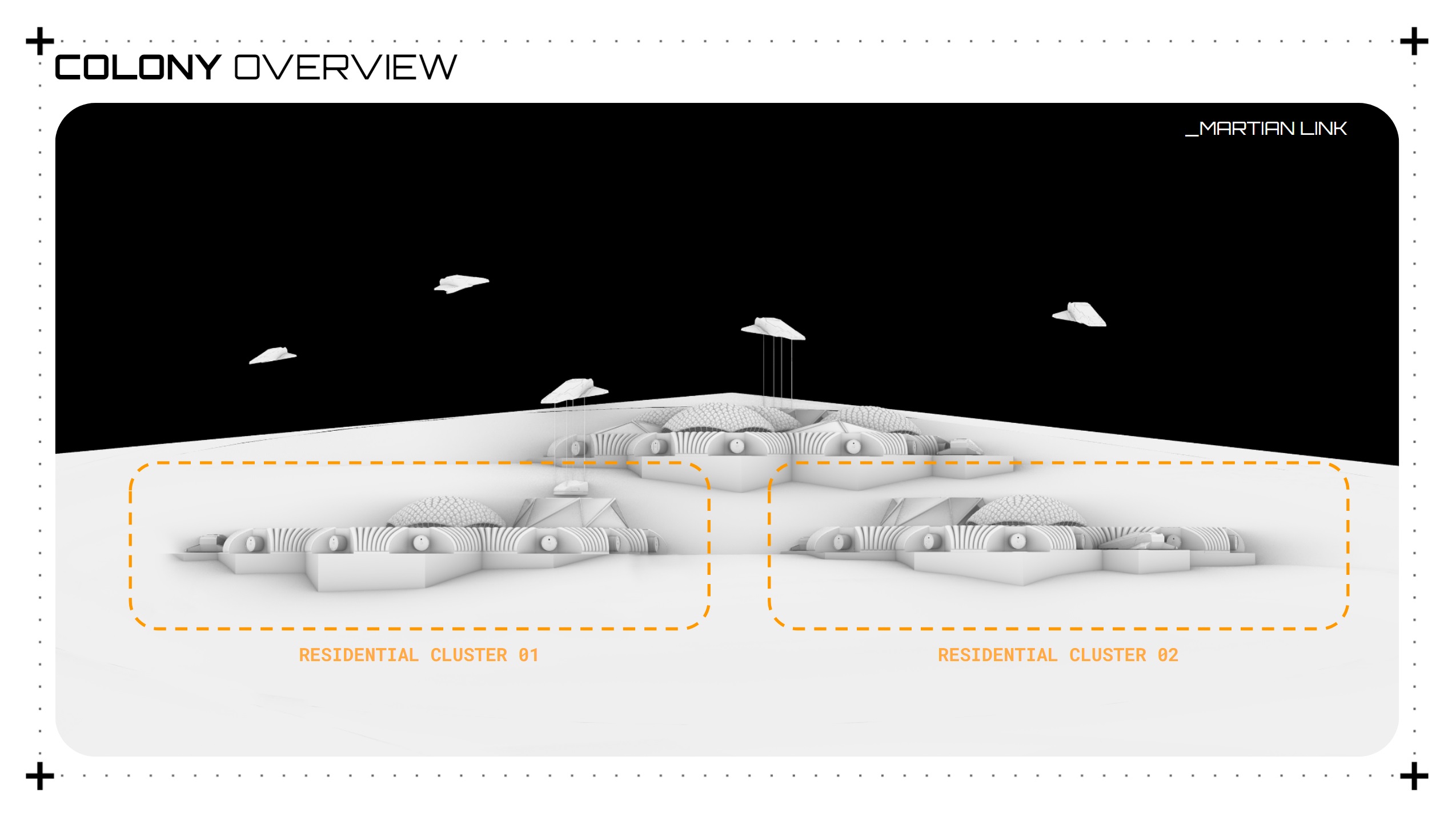
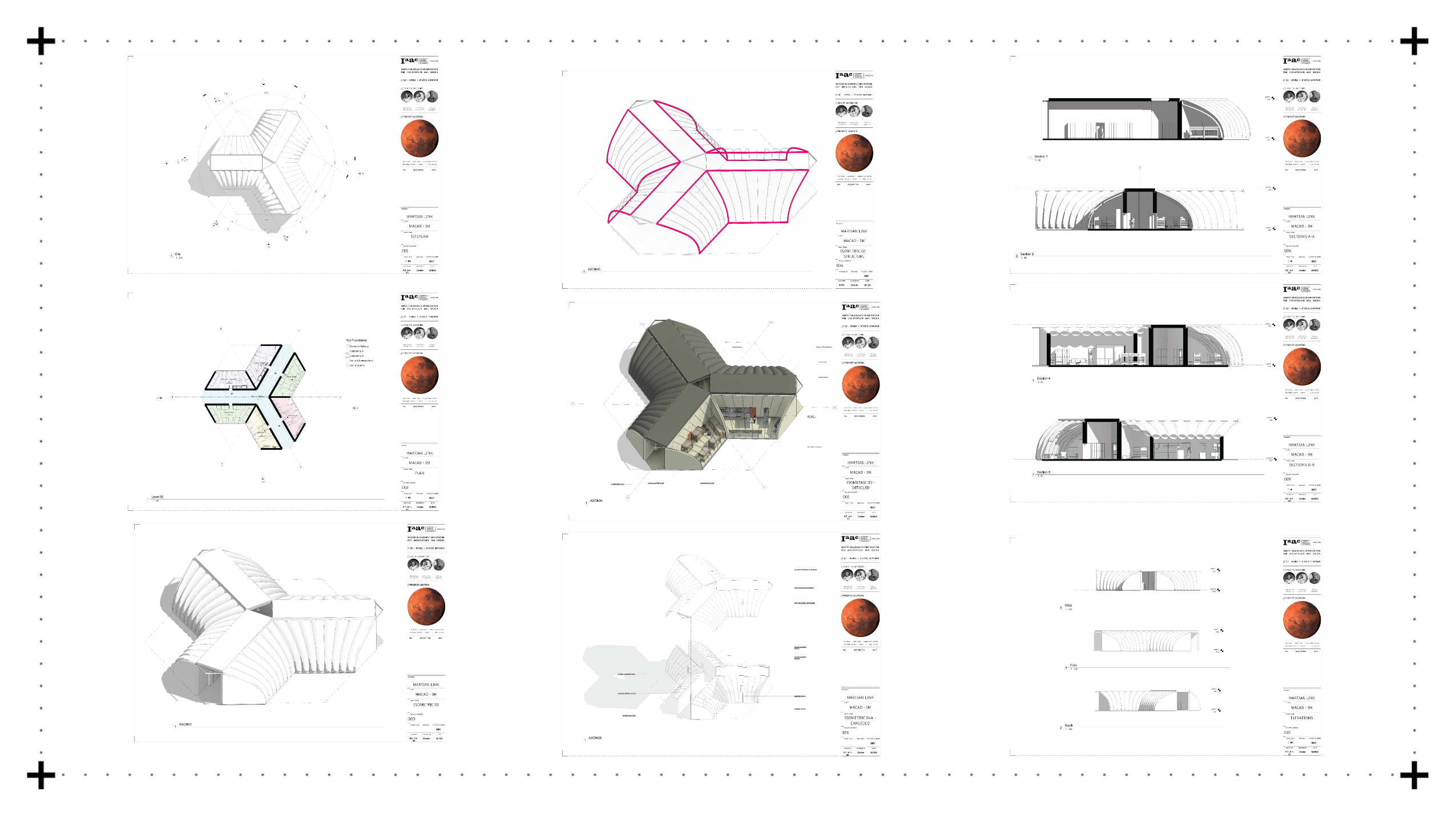
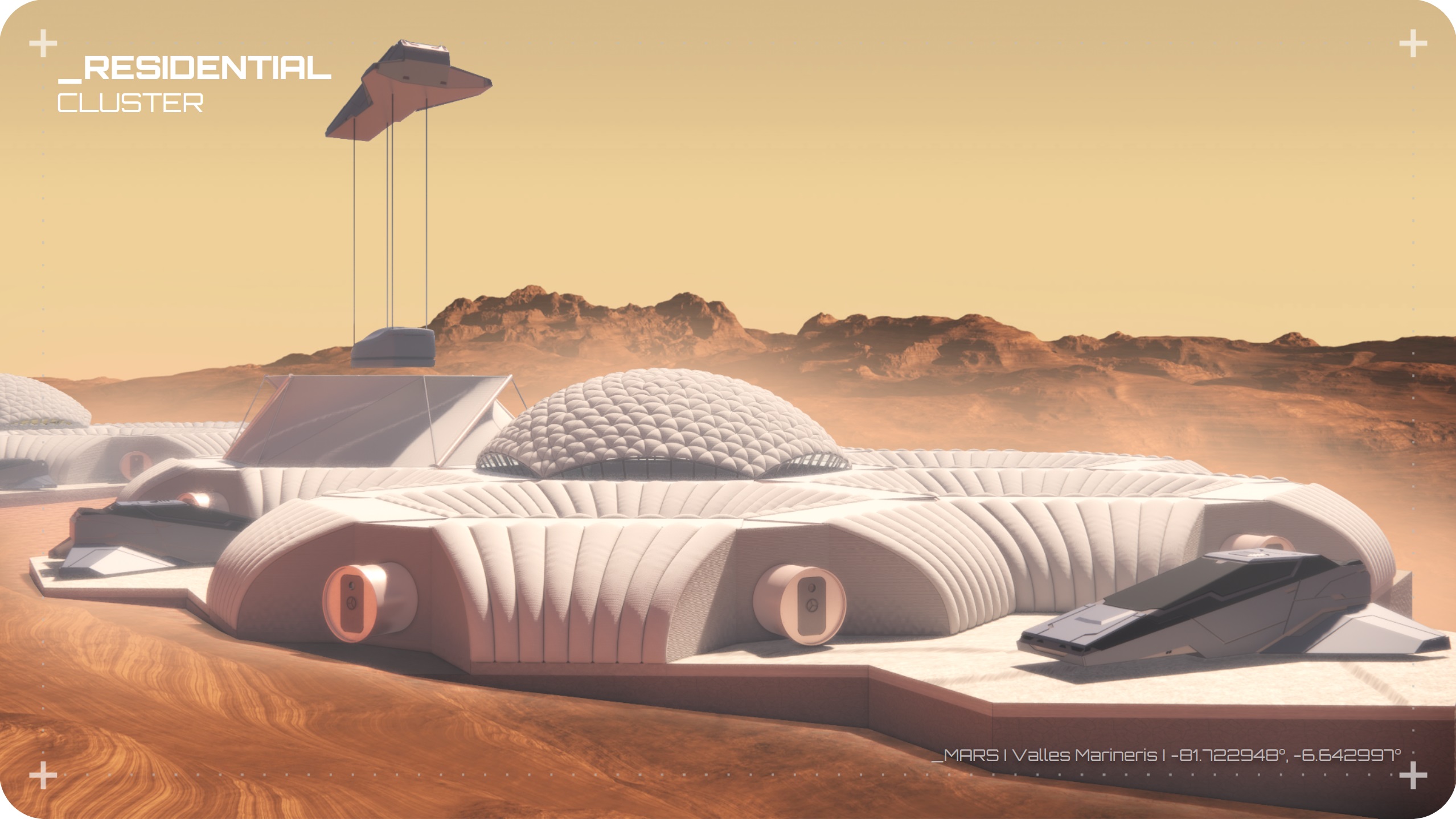
_RESIDENTIAL CLUSTER
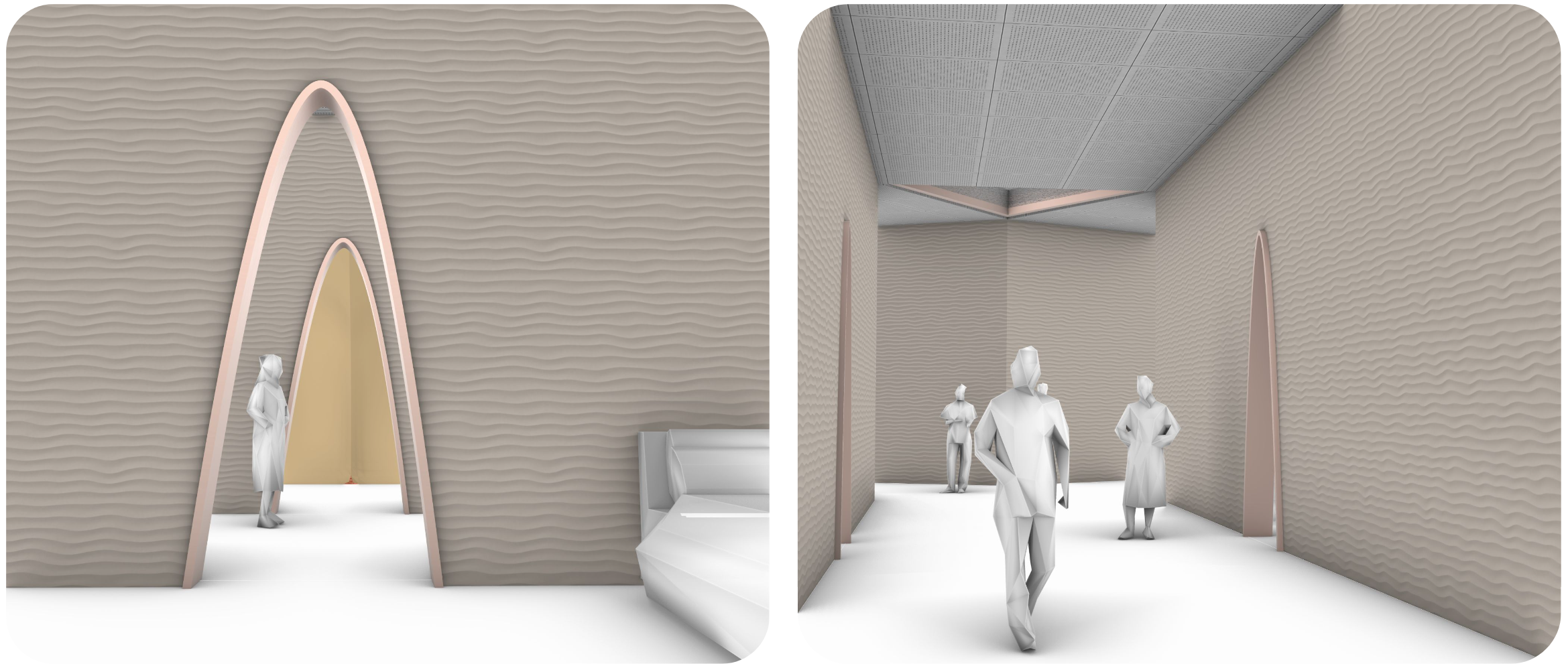
Each residential cluster accommodates 120 Martians within specialized pods featuring sleeping, lounge, and lab units, alongside a central common zone and a launching pad hexagon for the helipad. The cluster’s infrastructure includes a terraforming base, 3D-printed walls, and inflated residential pods. Additionally, a central dome-covered space facilitates communal activities such as food farming, spirituality, and recreation, fostering a sense of community. To enhance navigation and connectivity, connecting corridors are integrated, providing easy access between different areas within the cluster. Furthermore, the cluster provides designated parking for capsules, ensuring safe and efficient aerial transportation within the colony.
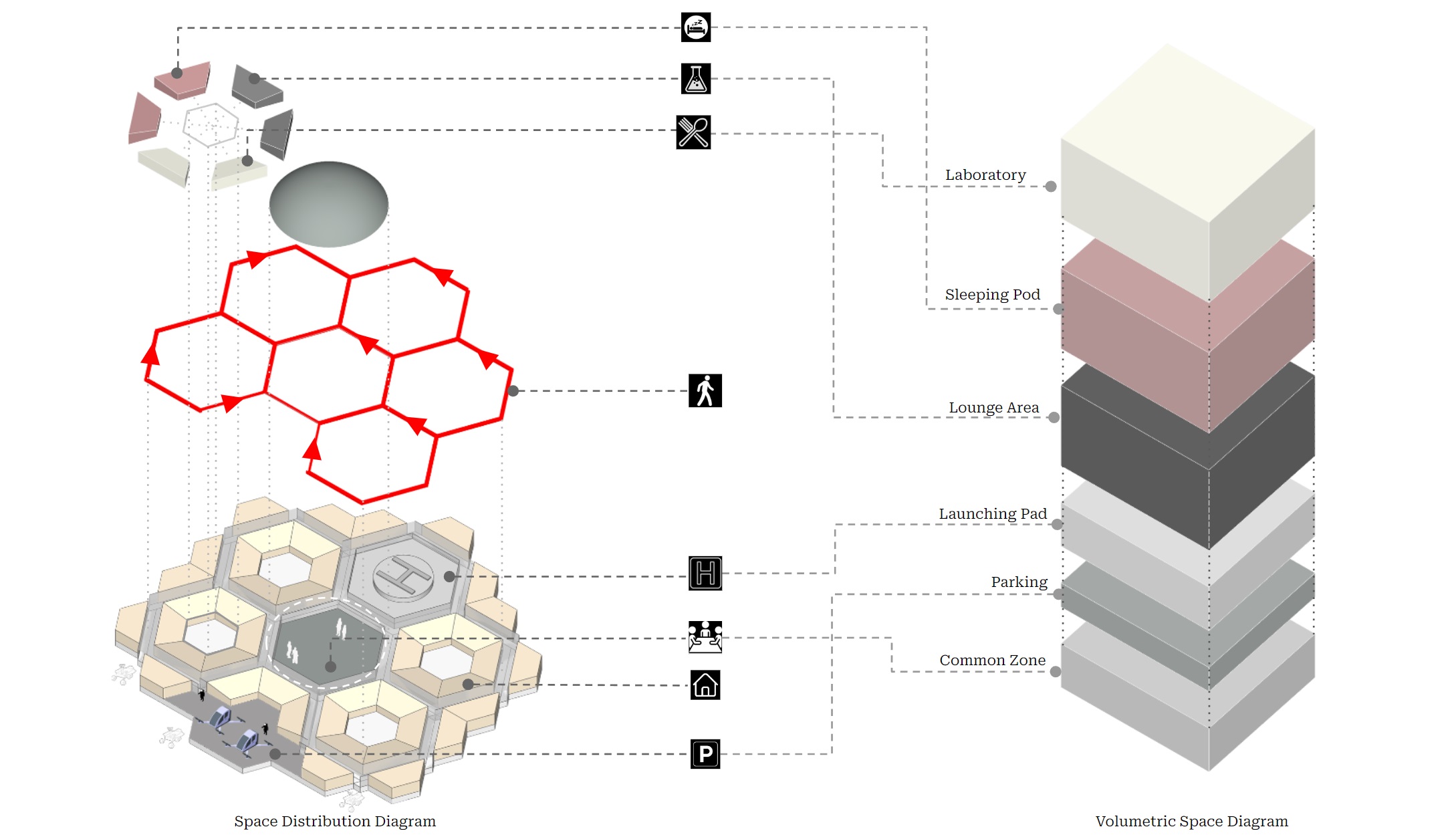
_RESIDENTIAL POD Kit Of Parts
Our Hexagon Residential Unit comprises of 6 Pods designed based on the Hexagonal Grid system. From comfortable living quarters to lounge spaces, and laboratories, each pod has been detailed out with human ergonomics and furniture. Anchored by a sturdy rigid cable structure, our design ensures stability and resilience in the Martian environment. Wrapped around this framework is a lightweight skin material engineered for both protection and habitability. Comprising six layers of defense – including double membrane, PTFE layering, and vacuum spacing. With an outer shell-inner shell configuration and reinforced aluminum structure framing, our design effectively shields against radiation while maintaining structural integrity, with a thickness of 0.5-meter thickness. For the construction process, we’ve devised an efficient assembly method leveraging robotics and pre-made, flat-packed elements transported from Earth and assembled on the surface of Mars. This approach streamlines construction while minimizing the need for extensive manual labor in the challenging Martian environment. Upon arrival, rovers land on Mars to initiate groundwork for the colony’s establishment, locating optimal coordinates and marking designated areas for construction. Essential energy sources and infrastructure are swiftly established to sustain colony operations. Local regolith is utilized for 3D printing structural components, while inflatable structures are strategically installed to enhance habitability and functionality within the colony.
Robots play a pivotal role in the assembly process, autonomously executing tasks with precision and speed. Equipped with advanced programming and sensing capabilities, these robots navigate the Martian terrain and coordinate assembly operations with minimal human intervention. From erecting tensegrity structures to deploying inflatable modules, robots ensure the accuracy and efficiency of each construction phase. Key to our approach is the use of pre-made, flat-packed elements transported from Earth. These elements, designed to be lightweight and compact for space travel, include structural components, inflatable modules, and essential infrastructure pieces. By pre-fabricating these elements on Earth and packaging them in a flat-packed format, we optimize space utilization during transit and simplify logistics upon arrival on Mars.
Once on the Martian surface, assembly crews guided by robotic systems unpack and assemble these pre-made elements according to predefined plans and specifications. Modular construction techniques and standardized interfaces facilitate seamless integration, allowing for rapid deployment of transportation infrastructure, habitats, and support facilities across the colony.
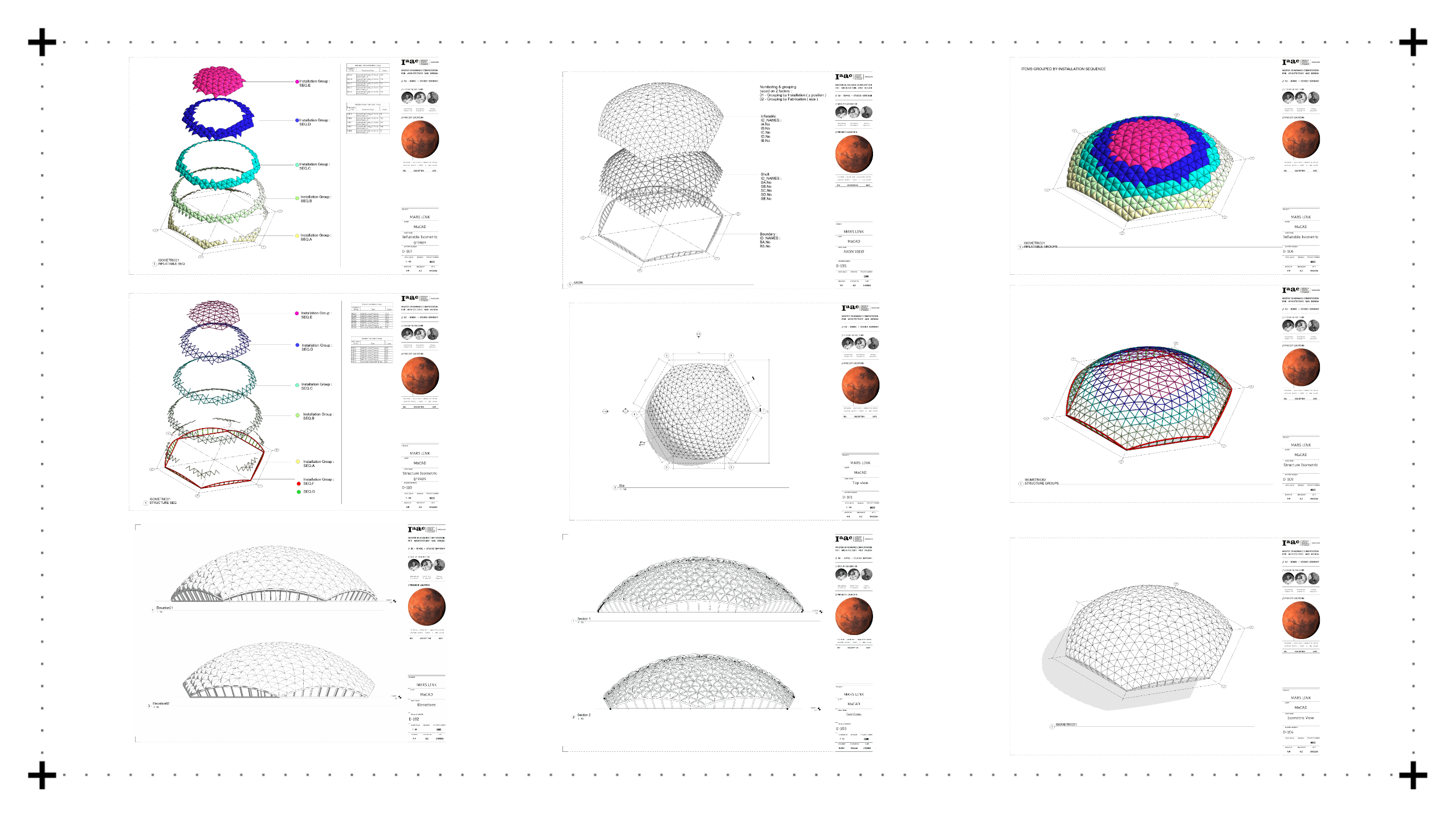
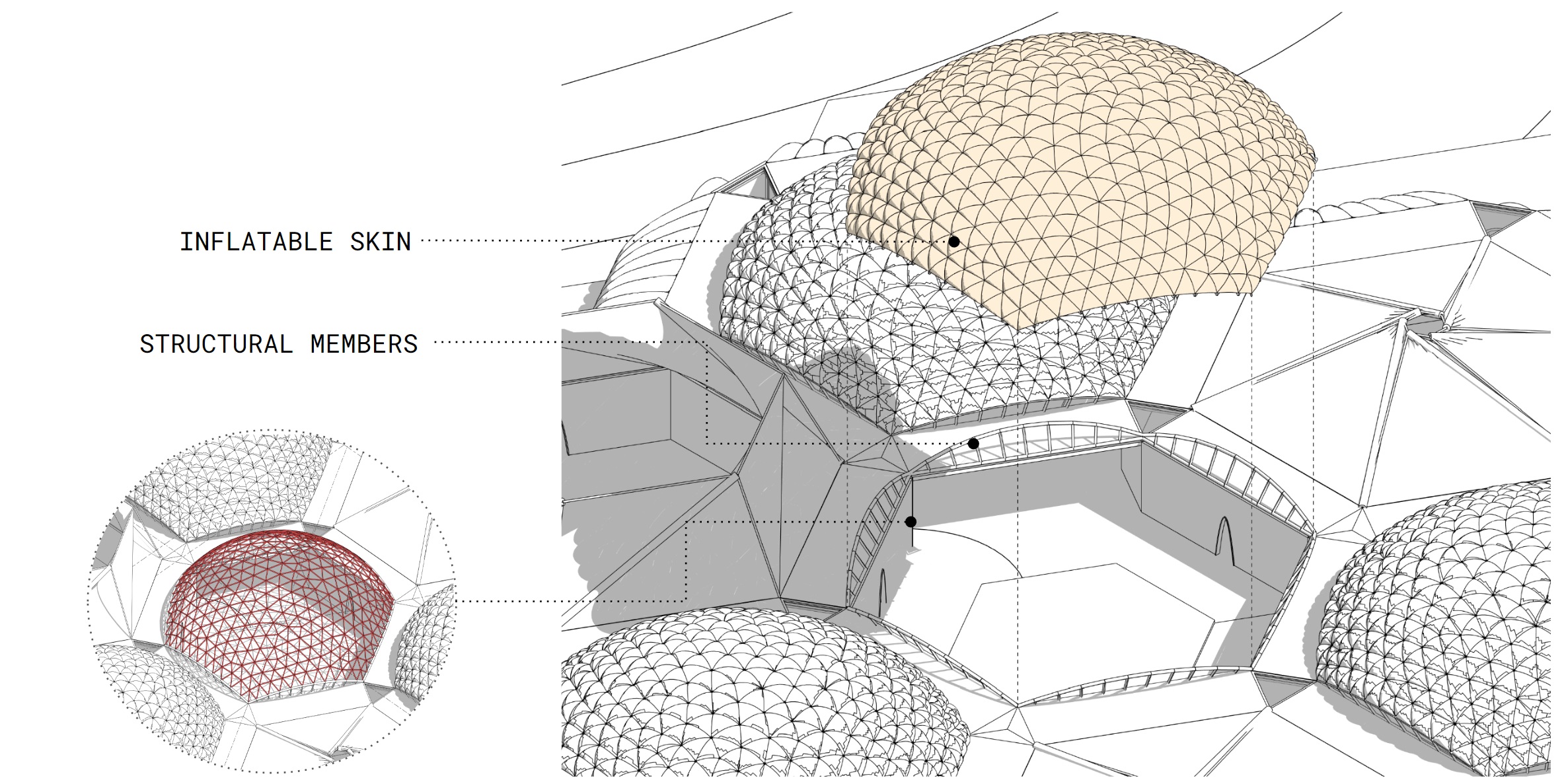
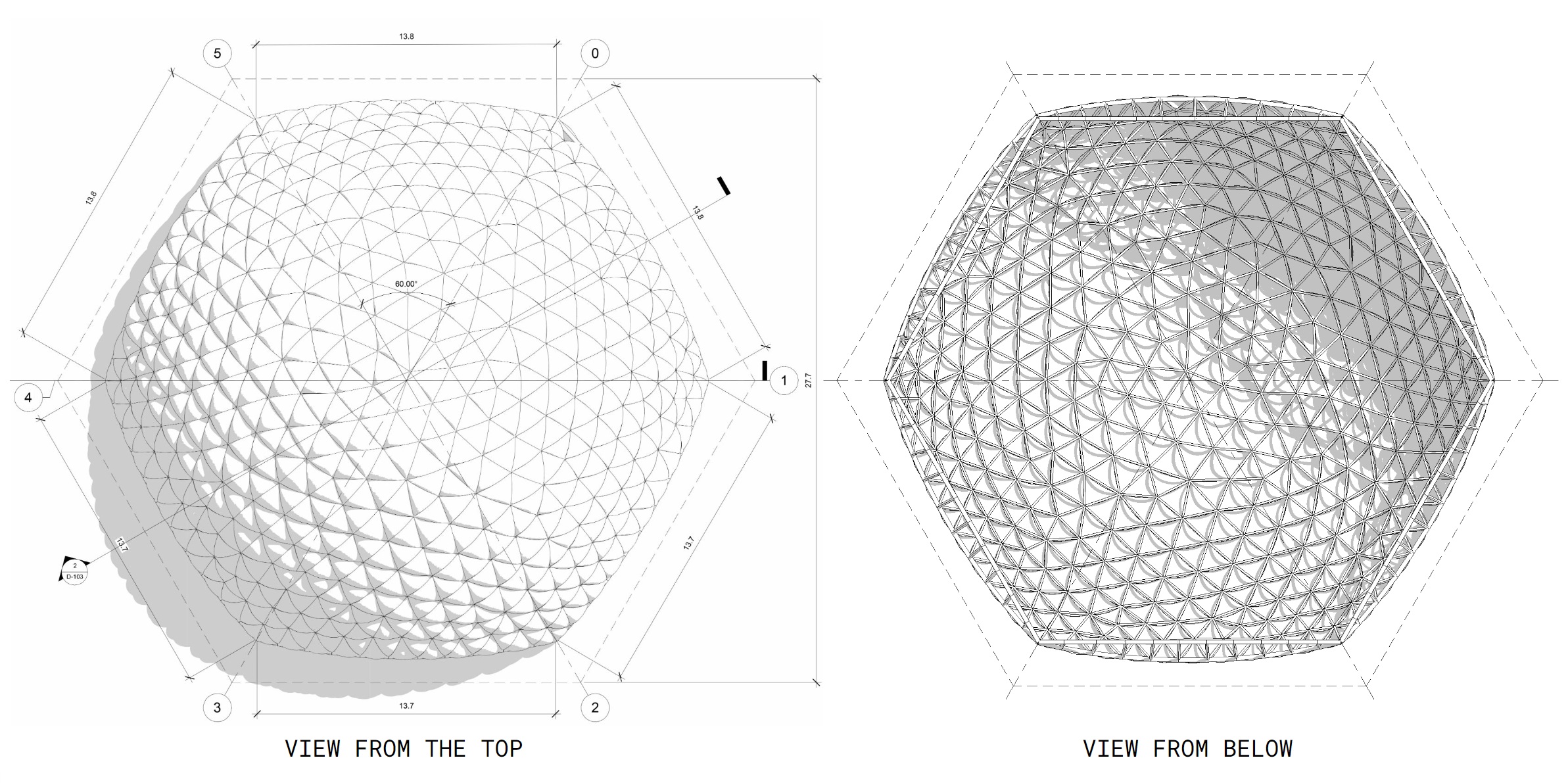
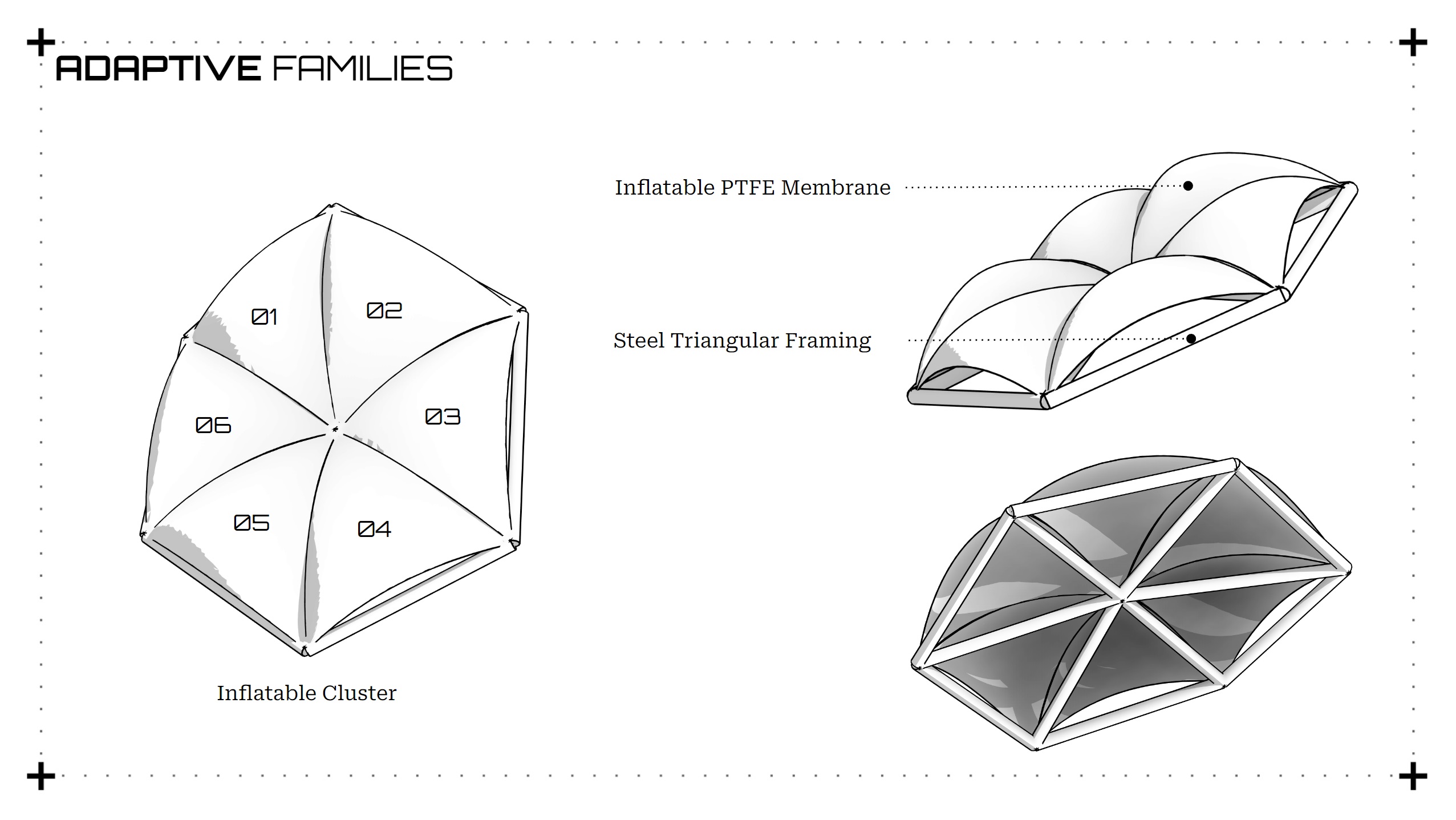
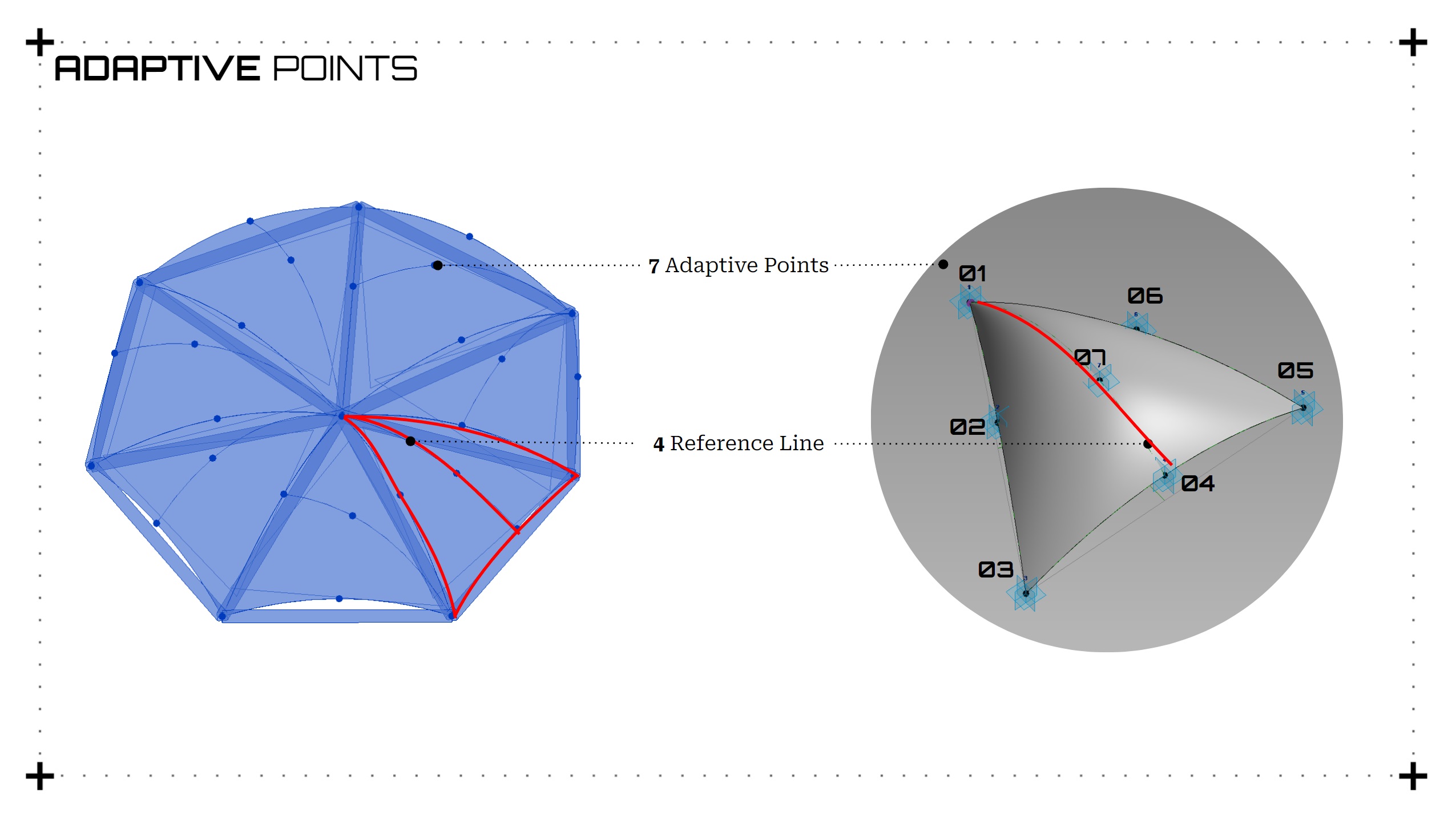
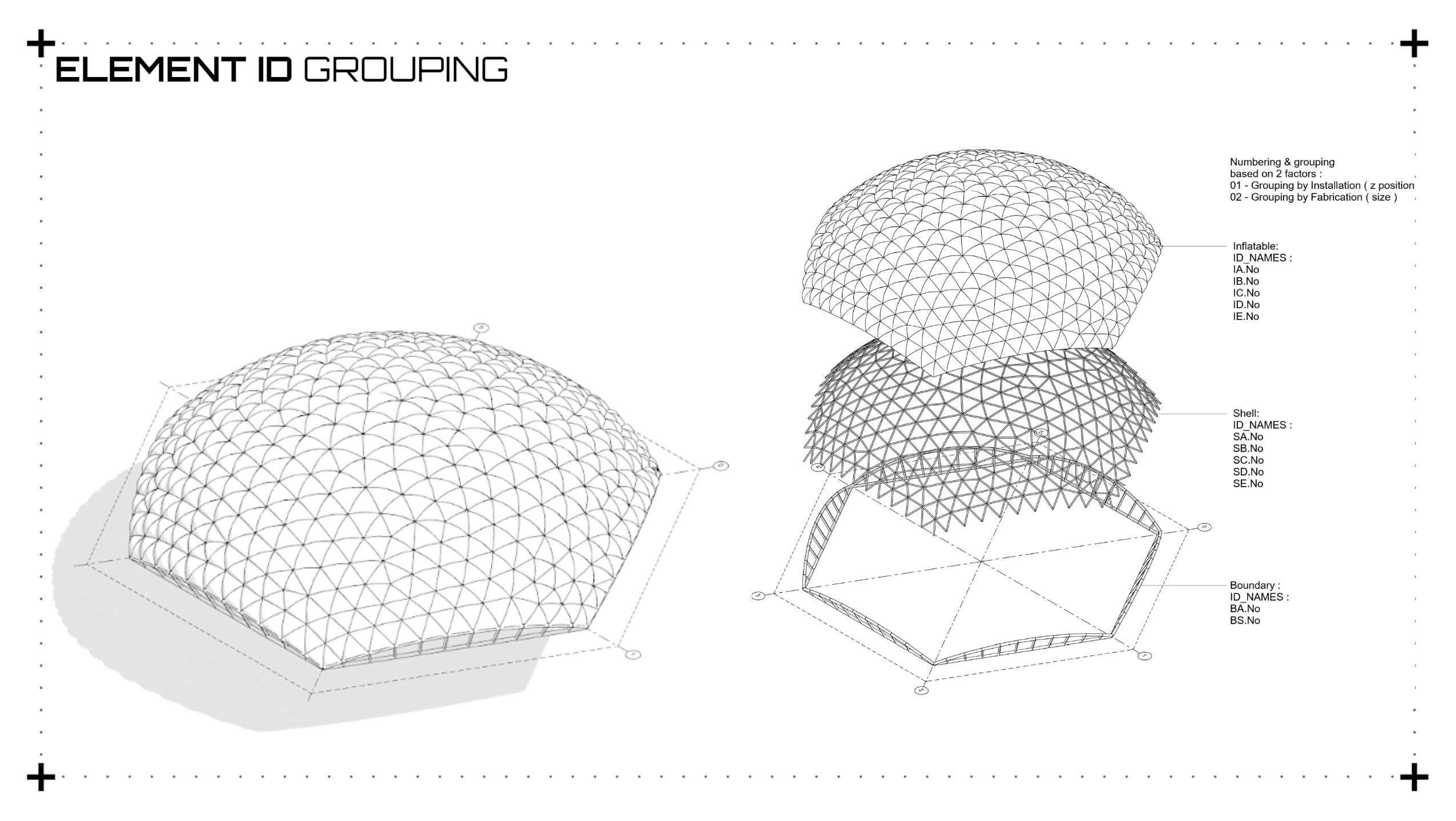
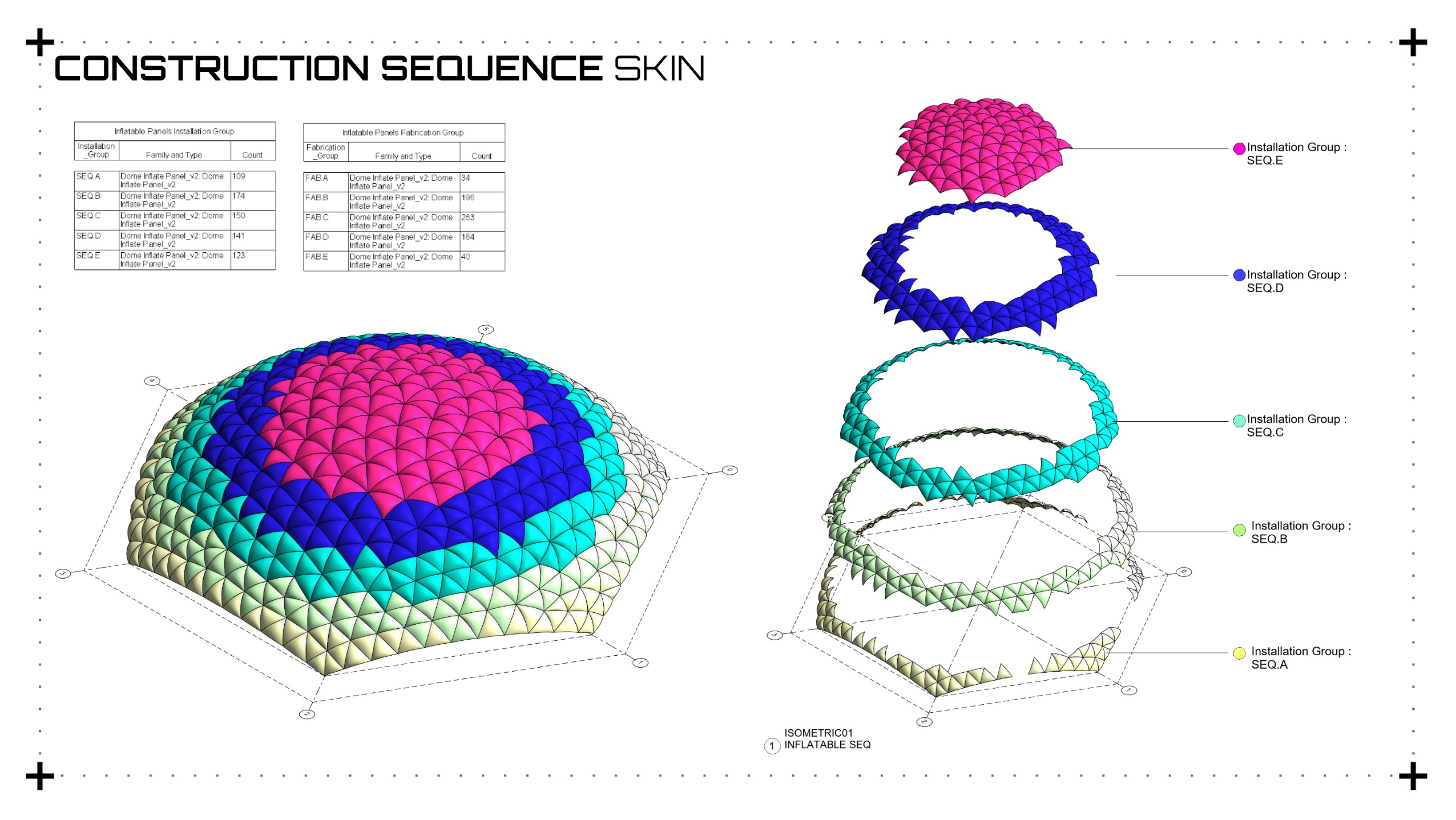
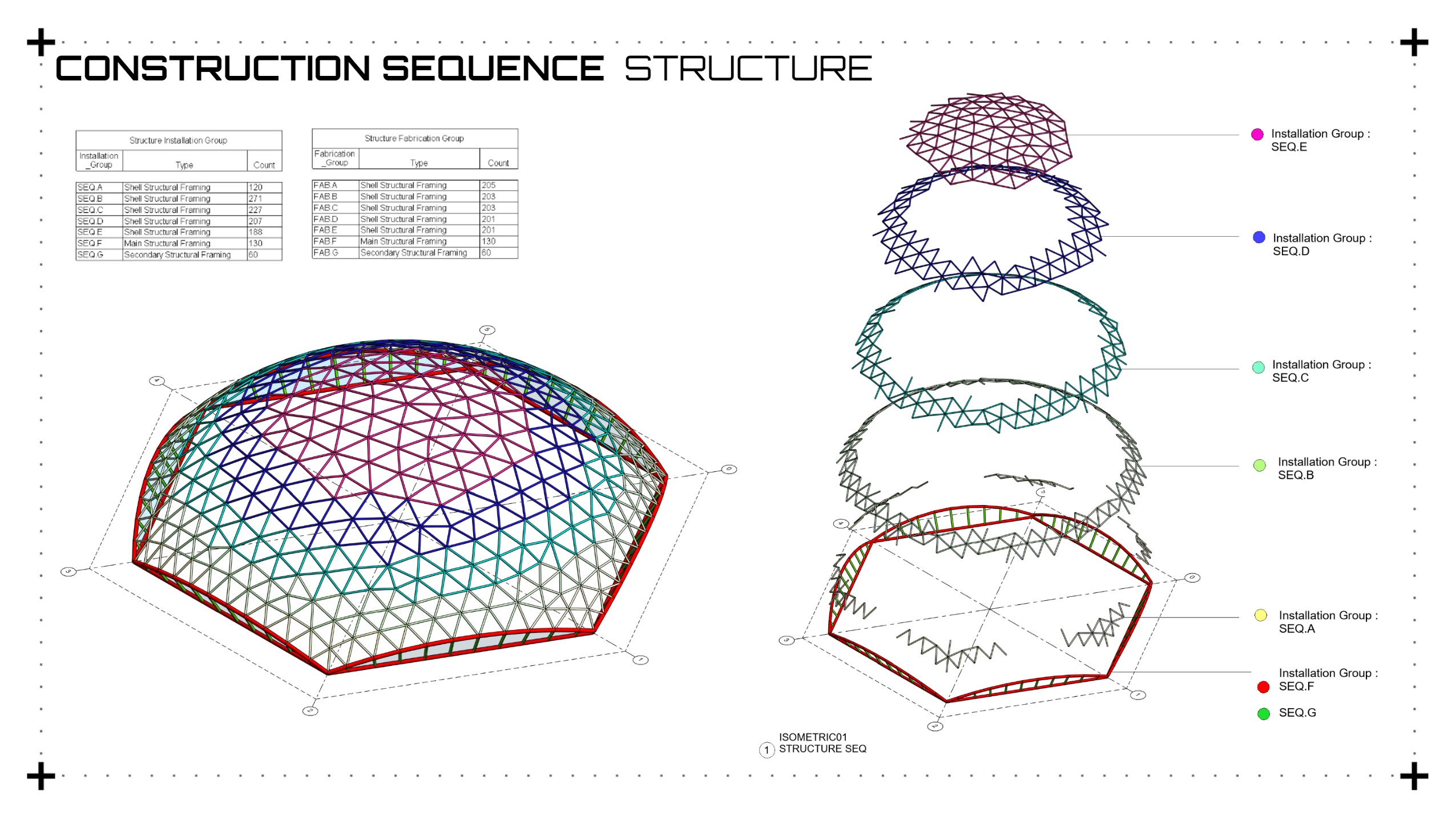
_INFLATABLE DOME
The inflatable domes serve as central gathering spaces within our Martian settlement, fostering community engagement and shared activities. We utilize advanced computational tools such as Kangaroo to simulate the inflation process, ensuring precise deployment. Custom Revit adaptive families are developed to seamlessly integrate these structures into our BIM workflow, enhancing design flexibility. Each inflatable panel is assigned an Individual ID for tracking purposes, facilitating smooth construction management. Leveraging Rhino.Inside, panels are grouped into installation categories to streamline assembly logistics. Structural triangular members are categorized by size and cross-section, simplifying fabrication processes and ensuring structural integrity. By organizing these elements into fabrication groups, production, and assembly are fully optimized.
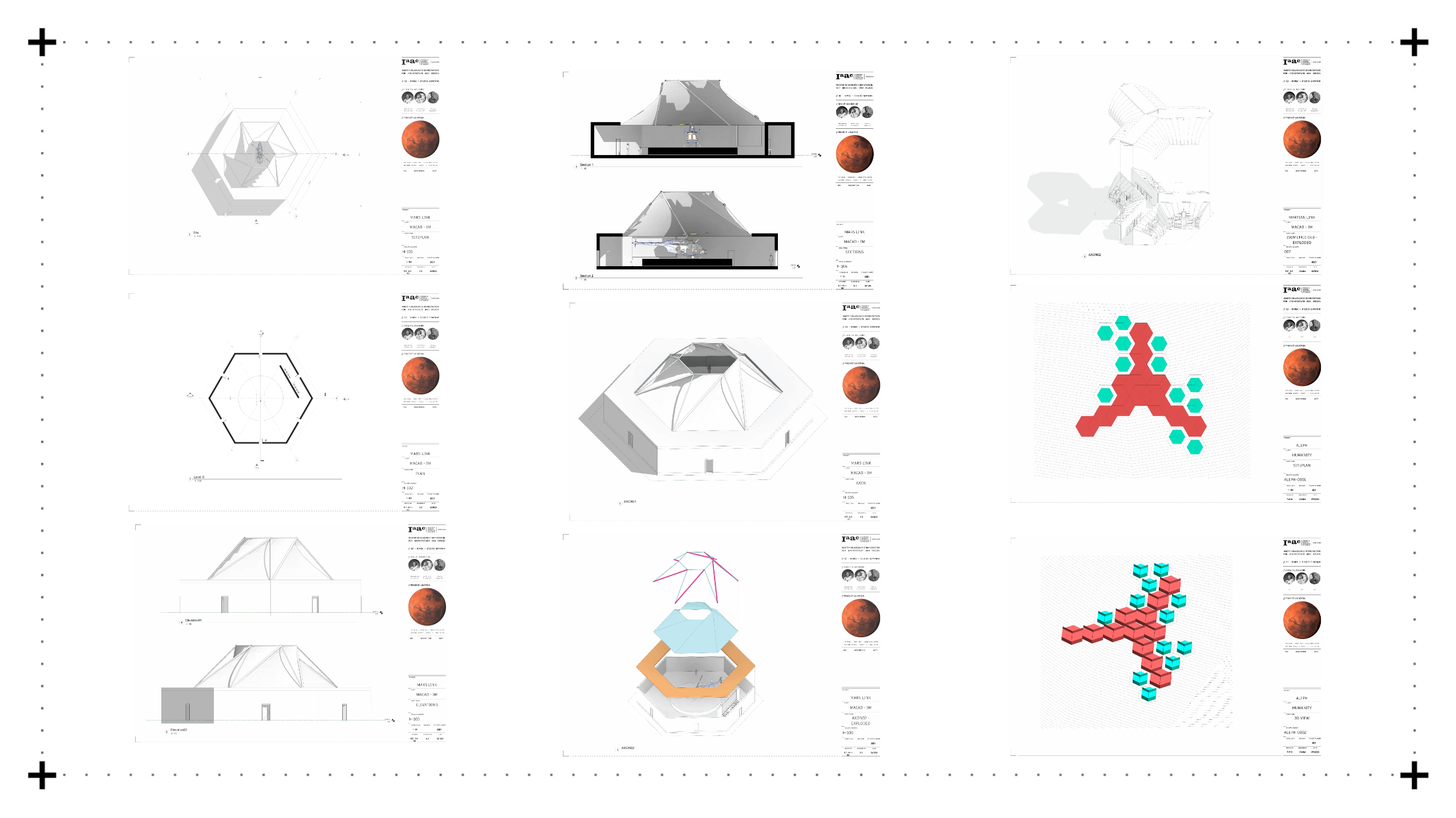
_HELIPAD Kit Of Parts
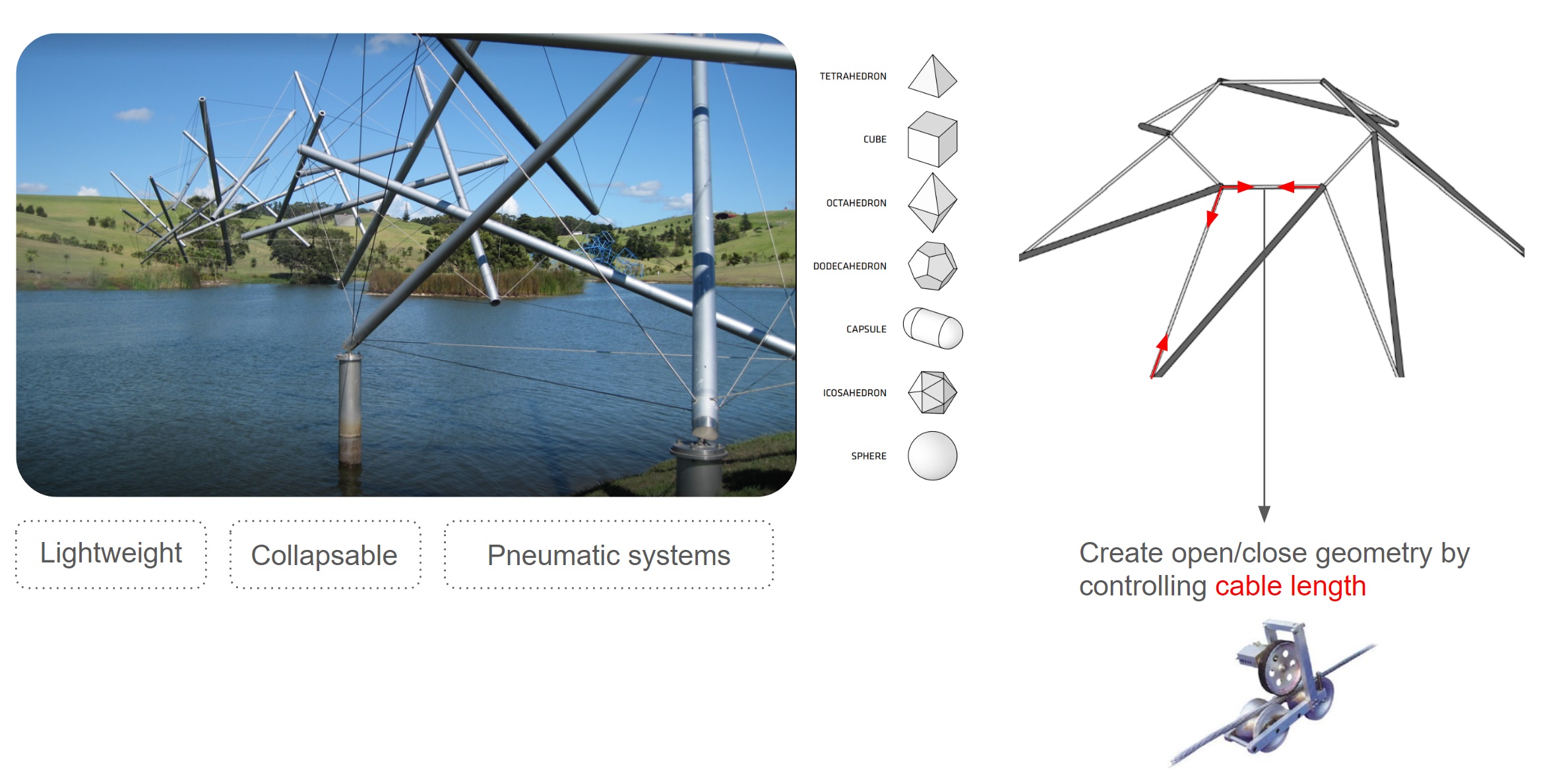
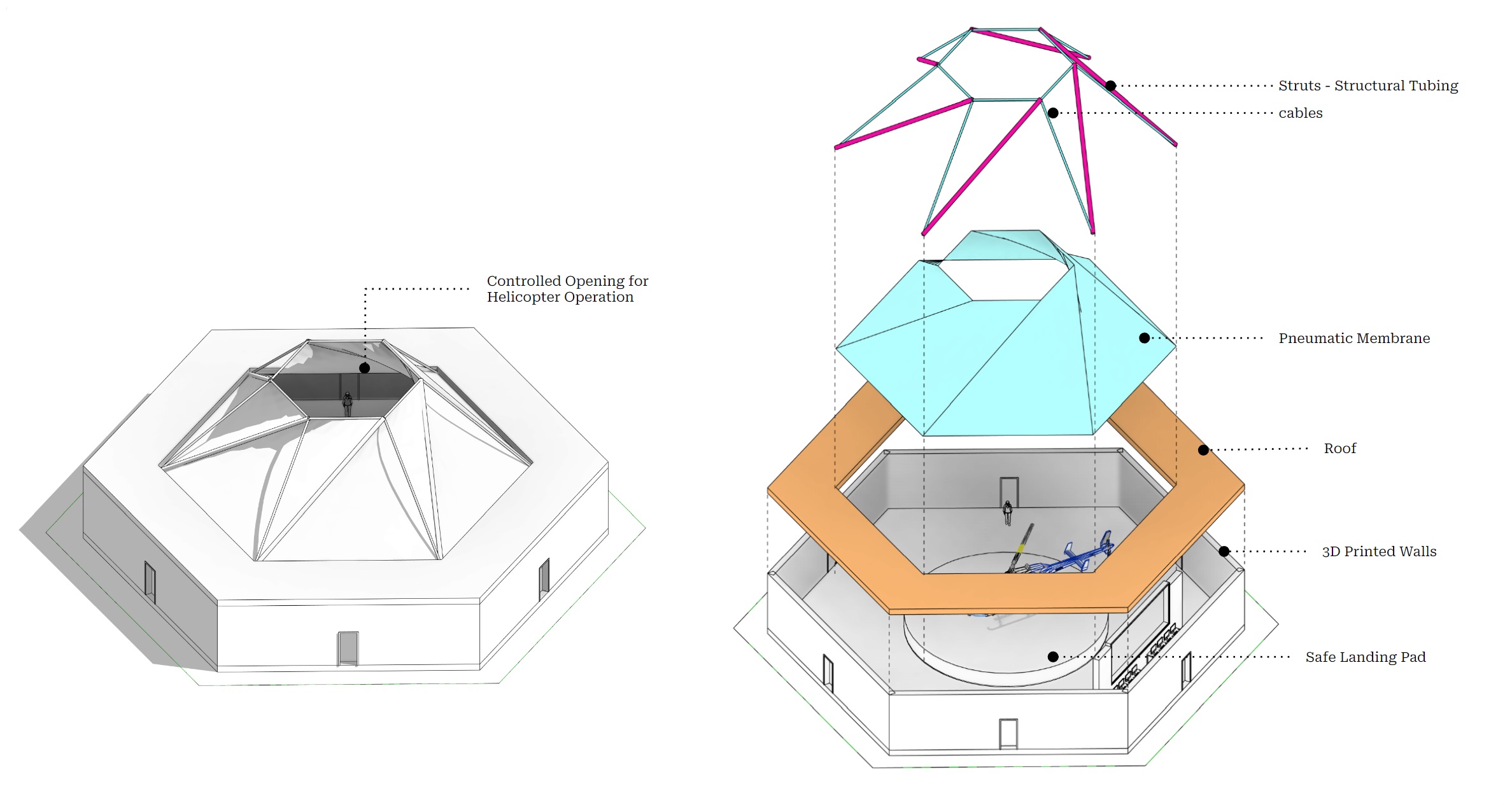
The launching helipad hexagon is comprised of a 3D printed base supported by a tensile structure, operating on the principle of Tensegrity to enable deployable structures through controlled cable length. Utilizing Kangaroo simulation, we simulate the opening and closing of the launch pad to create an airlock mechanism, ensuring the safety and integrity of the structure. The helipad is specifically designed to facilitate the smooth arrival and departure of capsules, featuring a membrane controlled by cables and struts. This results in a lightweight and flexible structure that can withstand external forces while remaining stable and resilient. Additionally, it is equipped with a safe landing pad and a designated radio control zone to ensure safe and efficient operations within the Martian environment.
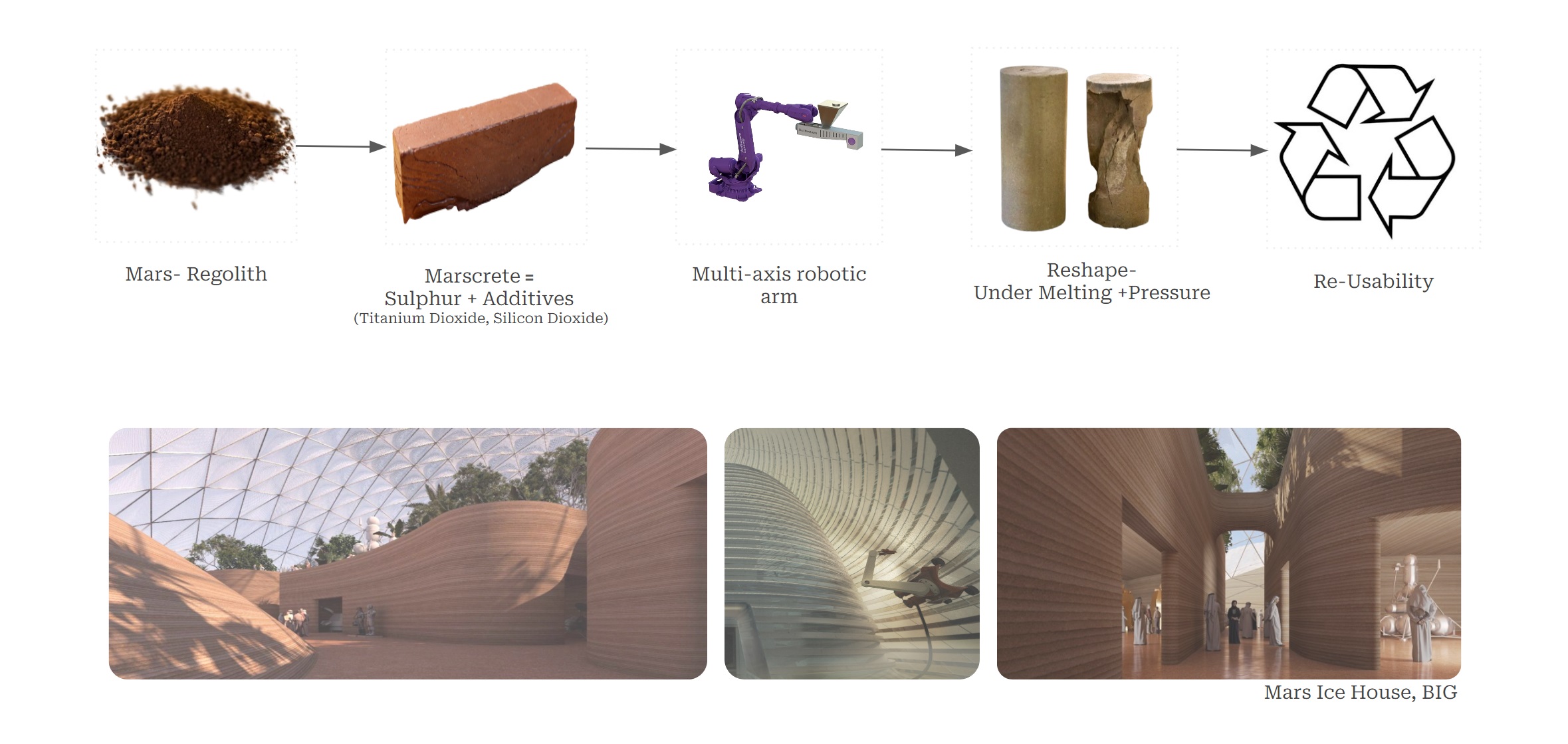
_MATERIAL RESEARCH
The structure of our Martian colony integrates two distinct material systems to ensure durability, adaptability, and habitability. The foundation comprises a 3D printed base, constructed by robots using Mars Regolith and additives. This innovative material can be reshaped under temperature and pressure, allowing for future reuse and sustainable construction practices.
Our connecting corridors within typical clusters feature 3D-printed walls, creating versatile pathways with slabs and skylights at junctions, fostering natural light and efficient movement throughout the colony. The inflatable skin, inspired by the AIAA research paper proposal, adds another layer of protection and functionality. With a thickness of 0.5 meters, it incorporates six different protection layers, including a double PTFE membrane, vacuum spacing between layers, an outer shell, an inner shell, and aluminum structure framing. This multi-layered approach ensures optimal insulation, structural integrity, and radiation blocking, creating a habitable space for colonists. Similar to the Bigelow Expandable Activity Module, our system enables compact packing for transportation from Earth, facilitating efficient deployment and assembly on the Martian surface.
_COLLABORATIVE WORKFLOWS
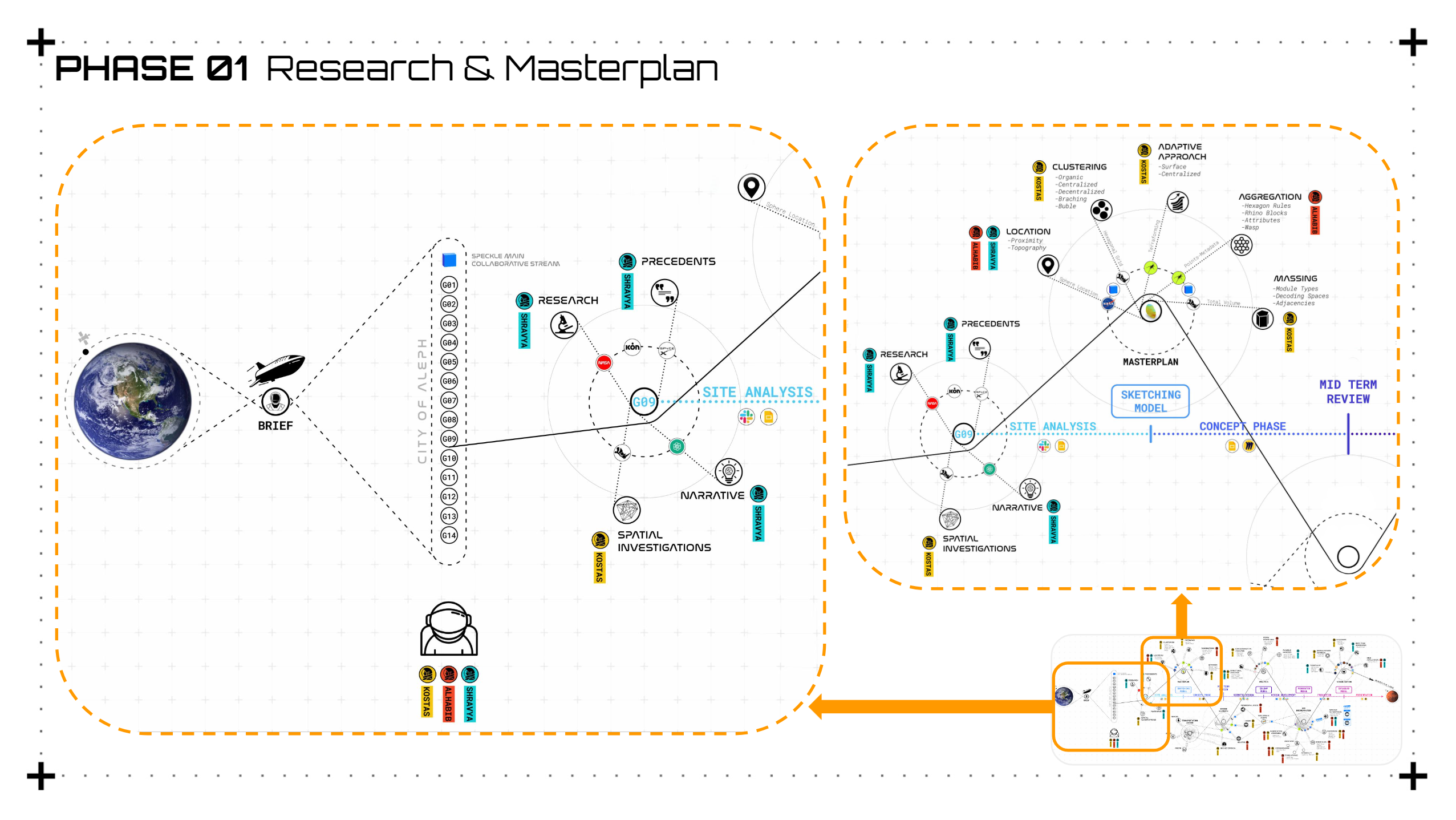
Our Overall Workflow Diagram delineates our journey from project inception to completion, navigating through various phases along a defined Timeline. Beginning with the project brief and research on Mars architecture, we embarked on an in-depth site analysis to lay the foundation for subsequent tasks. Transitioning seamlessly into Master Planning, we outlined individual tasks and identified programs used by each team member, initiating our first Sketching Models.
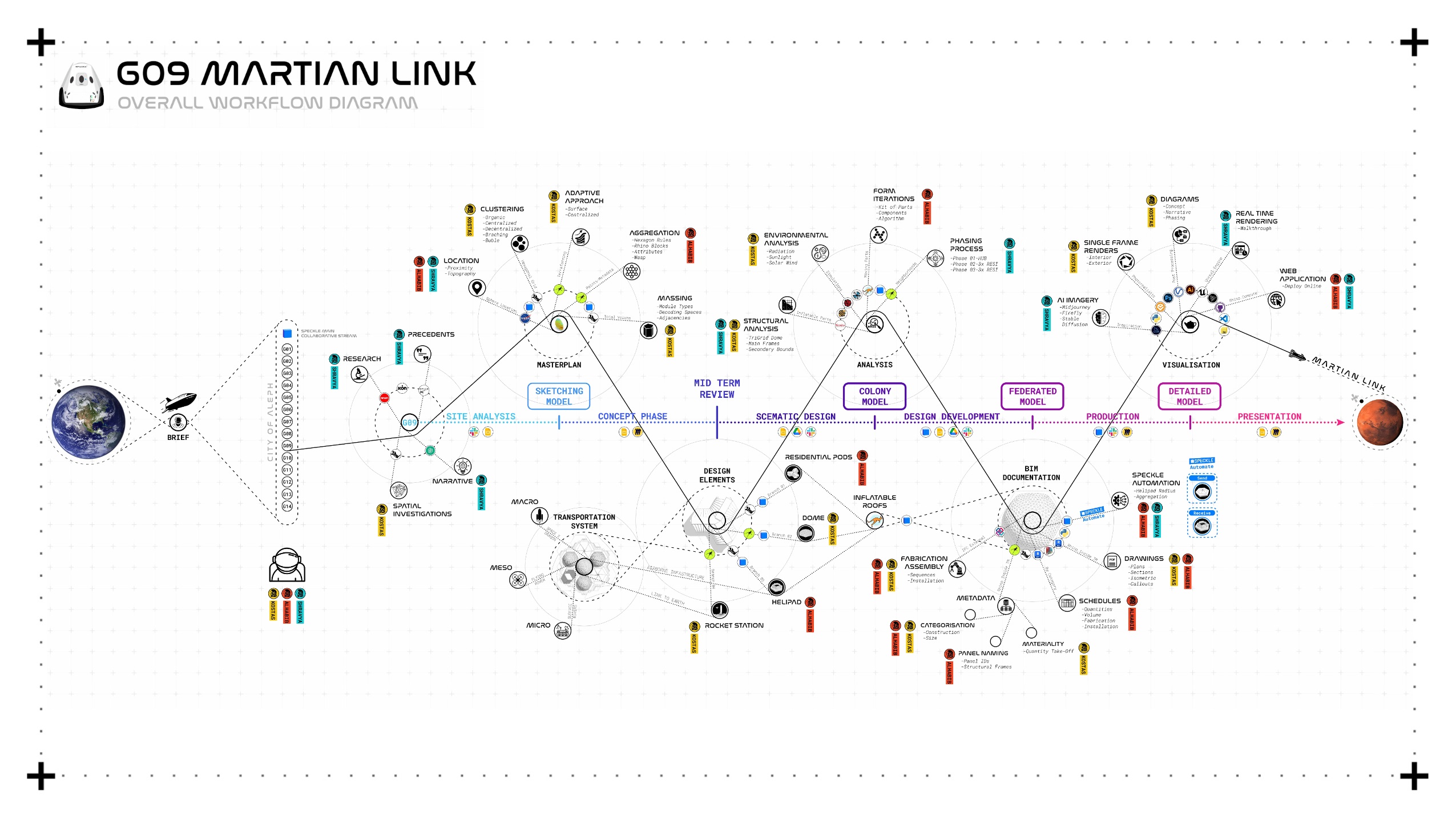
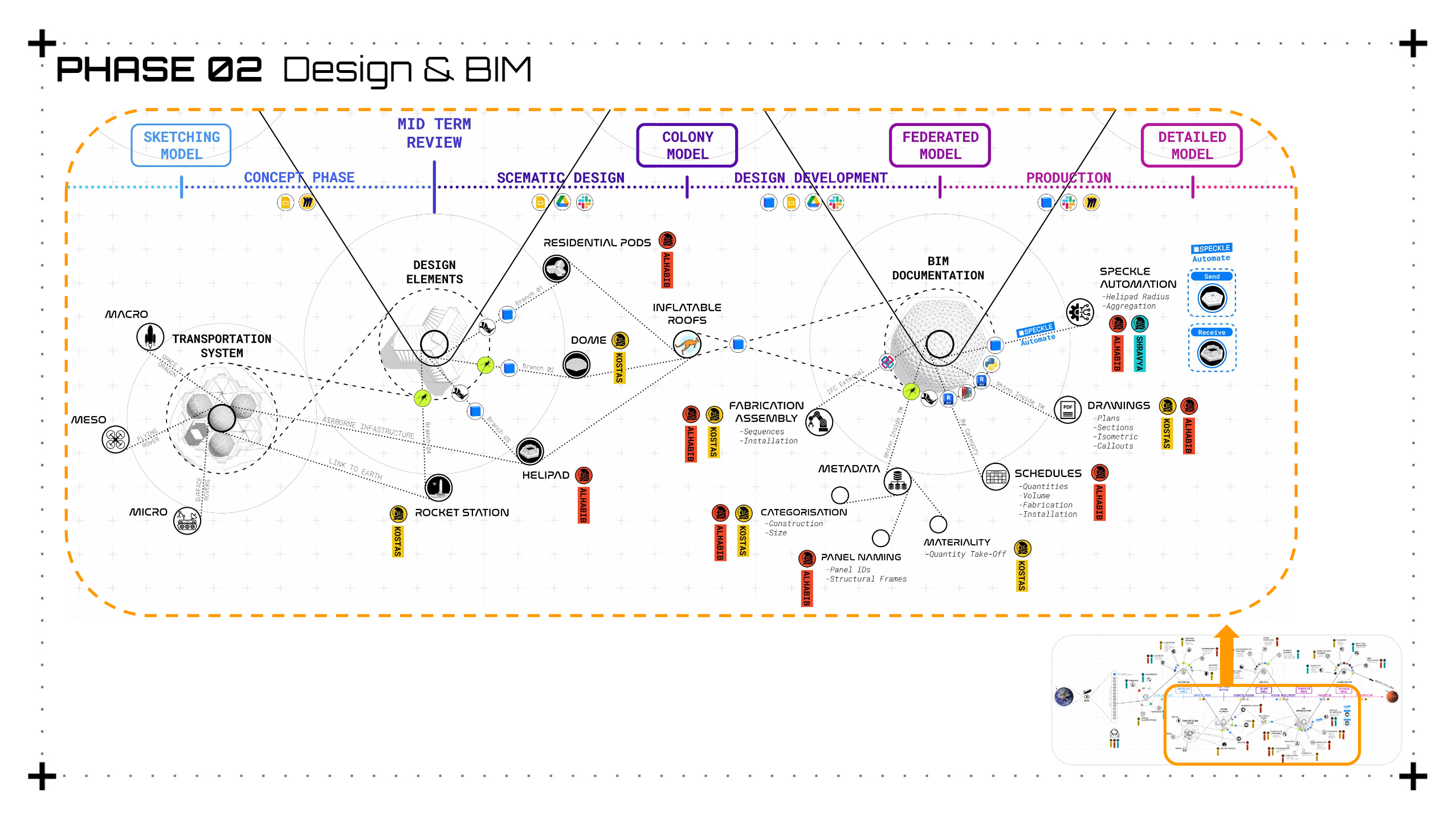
Progressing along the timeline, we entered the Design Concept Phase, splitting the project into distinct elements like residential structures, inflatable domes, helipads, and rocket stations. Simultaneously, our focus shifted to developing an efficient transportation system and initiating groundwork for documentation drawings, forging a crucial link between design and documentation.
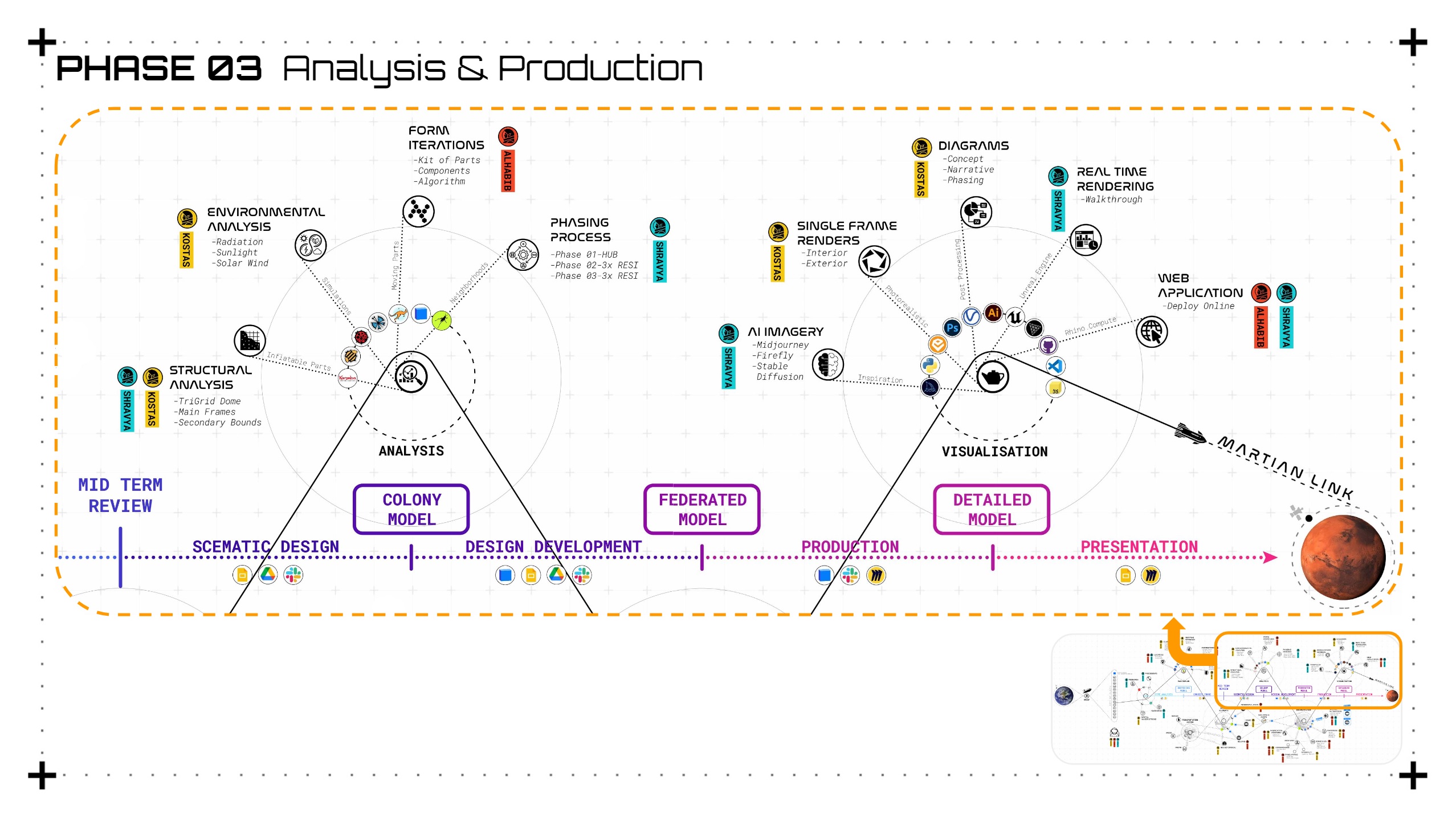
The introduction of the Speckle Automation Bot streamlined our processes, facilitating the generation of Drawings, Schedules, and Fabrication Details. As time progressed, we delved into the analysis phase, leveraging our evolving colony model for comprehensive environmental and structural assessments. The development of the Federated Model marked a significant milestone, propelling us into full production mode.
During this intensive phase, we dedicated efforts to refining renders, diagrams, and detailed models, culminating in the completion of our presentation. Each step along the timeline was executed with precision, contributing to the holistic realization of our architecture project on Mars.
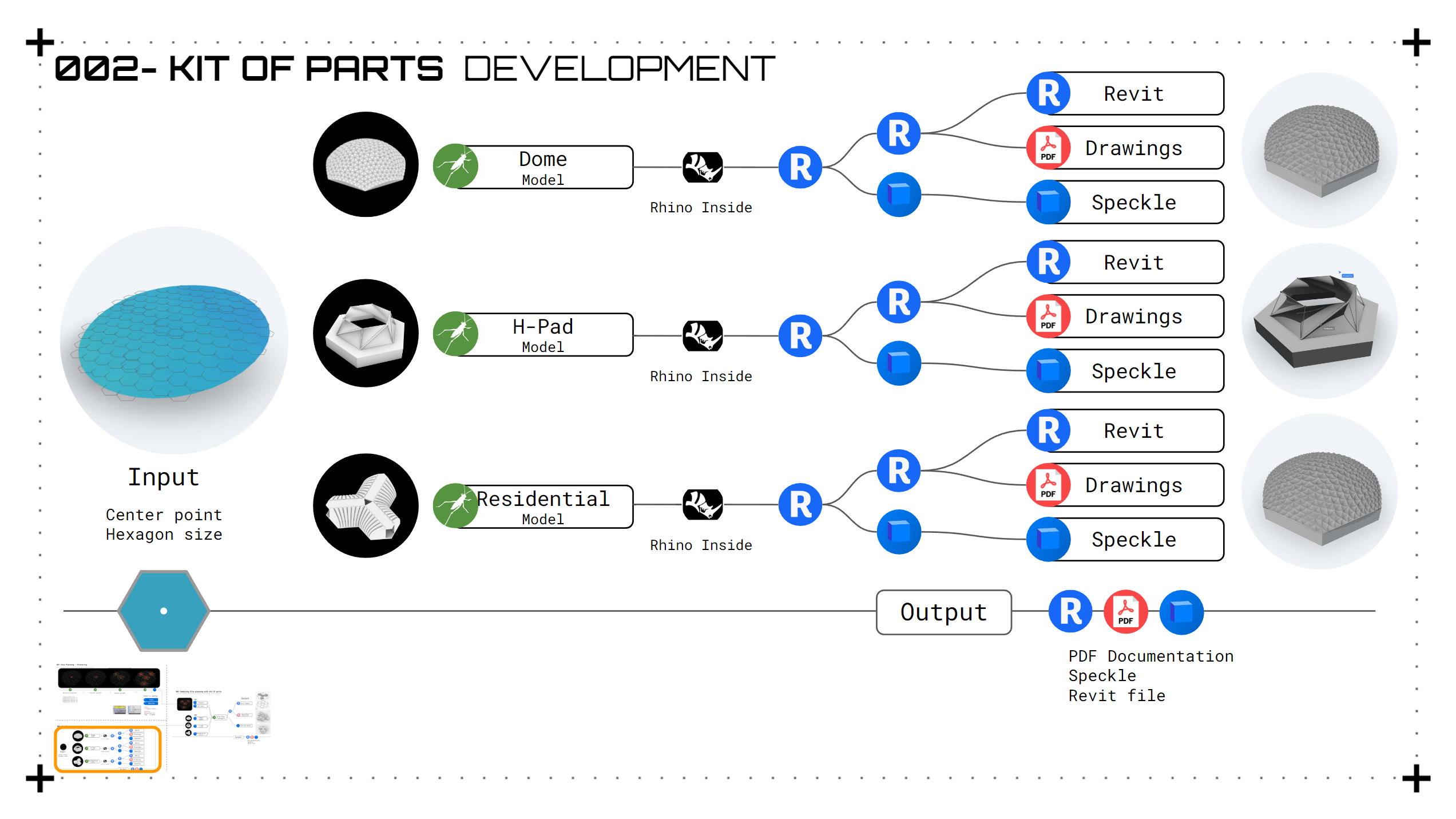
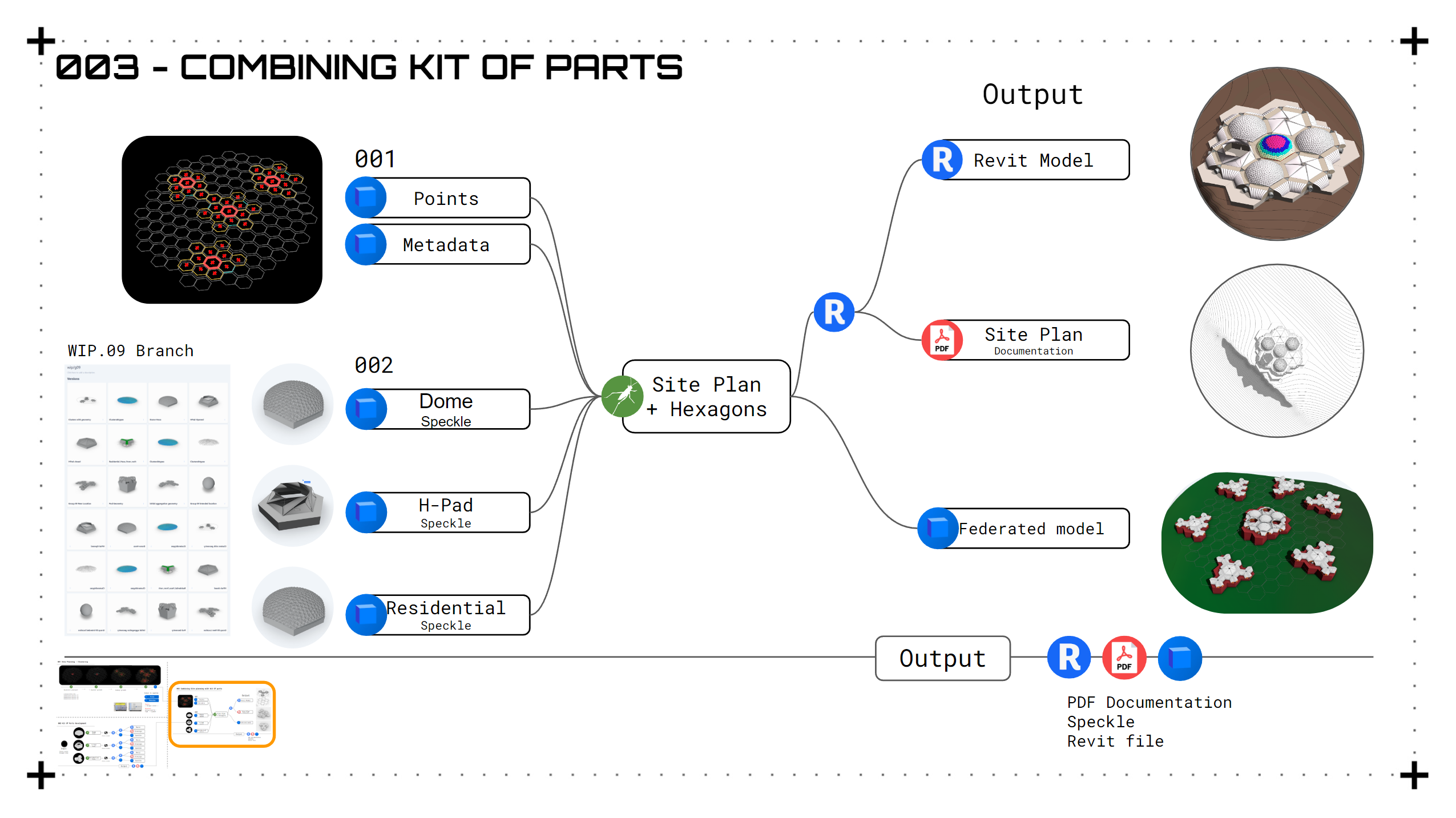
_Detailed Workflow Data & Documentation
In the detailed data manipulation process, we start by defining the central point and hexagon types for site planning. We then choose the most suitable Aggregation combination and transmit these points through Speckle. In the next phase, we develop hexagon kits using different Grasshopper scripts and share them via Speckle. Additionally, we use Revit for detailed documentation of the hexagonal geometries. Moving forward, we combine the data points received through Speckle with the three geometry types to create a Federated Model. Each kit is assigned to its corresponding point within the model. Finally, we proceed to post-processing, BIM documentation, and presentation stages to further refine and present the data.
_SHEETS Revit