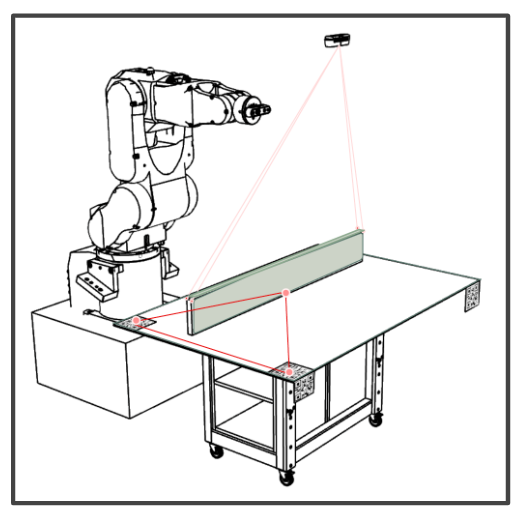
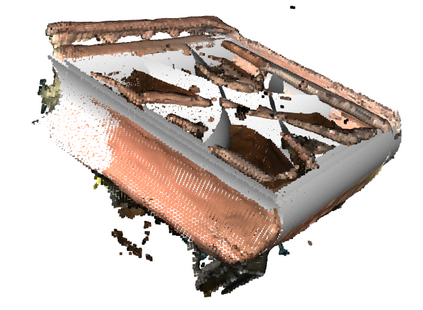
Scanning to compare clay bricks: Digital vs Real
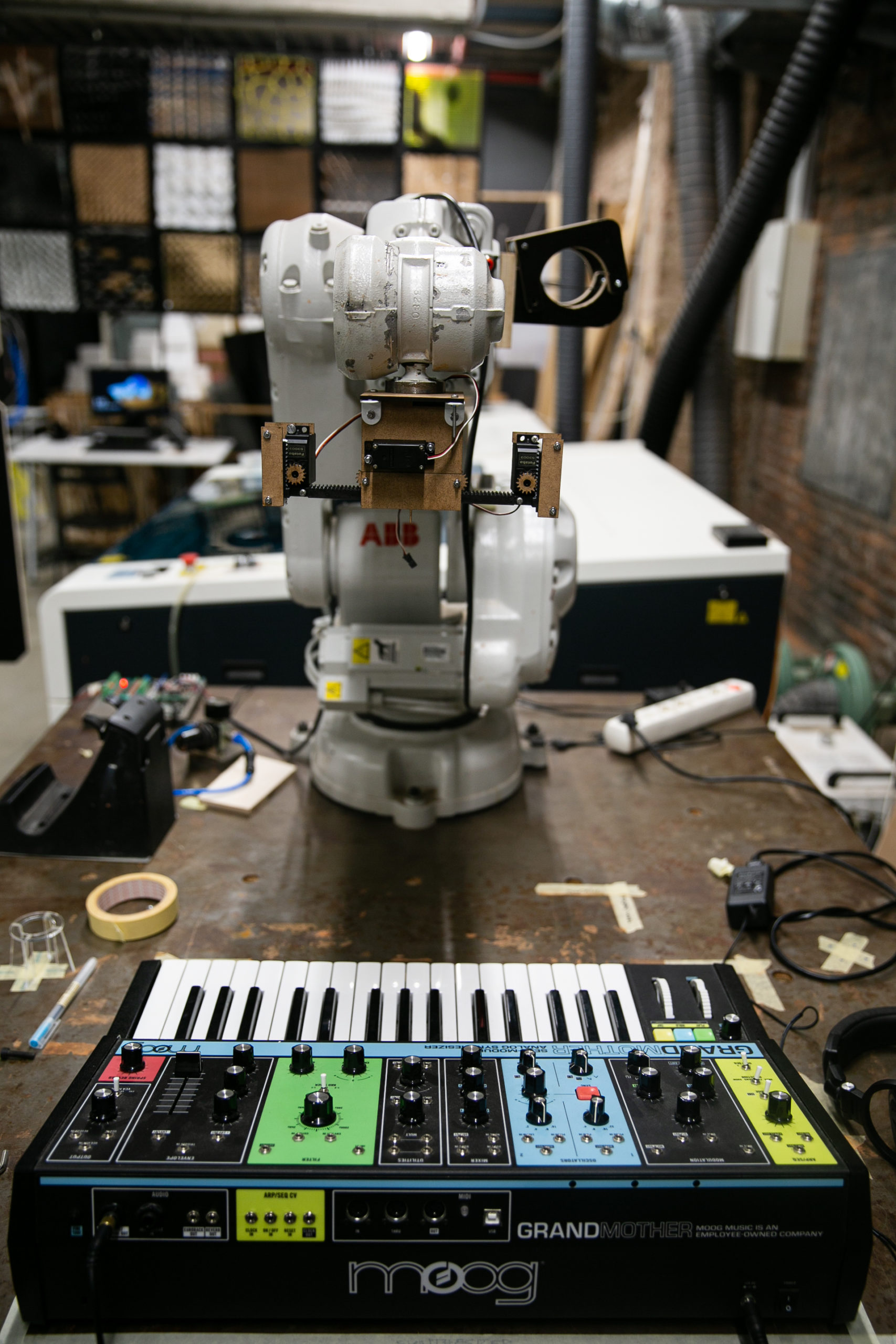
In this course we learned about the Robotic Operating System (ROS) and the MoveIt motion planning using Python for controlling robots. We also utilized development tools such as Git and Docker for managing the data. We learned about different types of sensors which helped for the robot’s motion visualization and scanning for the purpose of … Read more