Anatomy of a Machine: Stroke

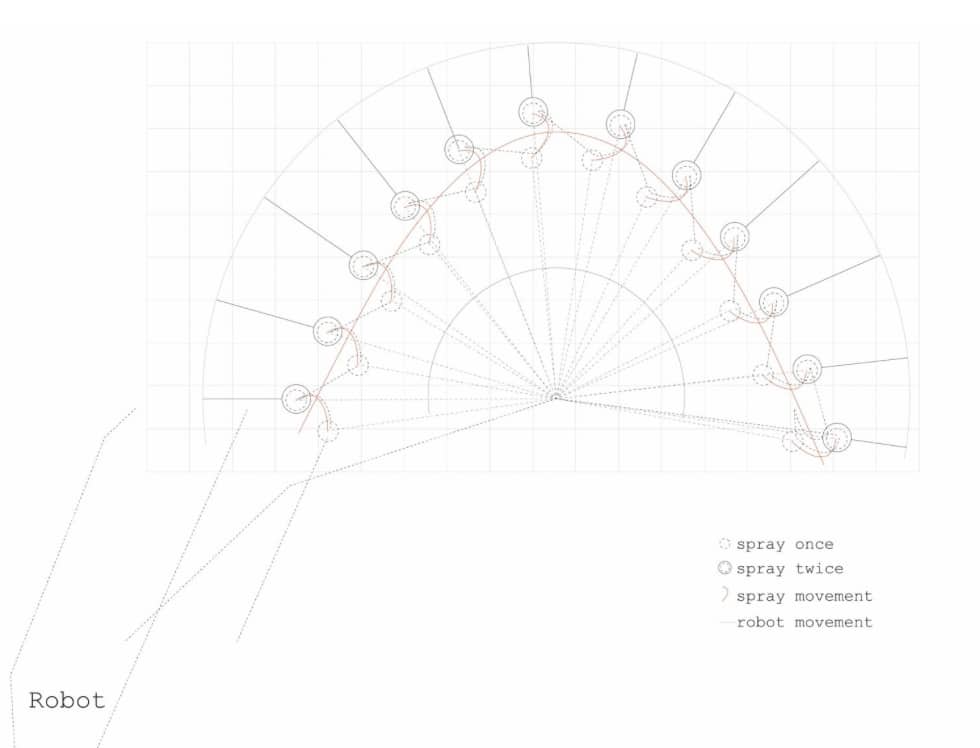
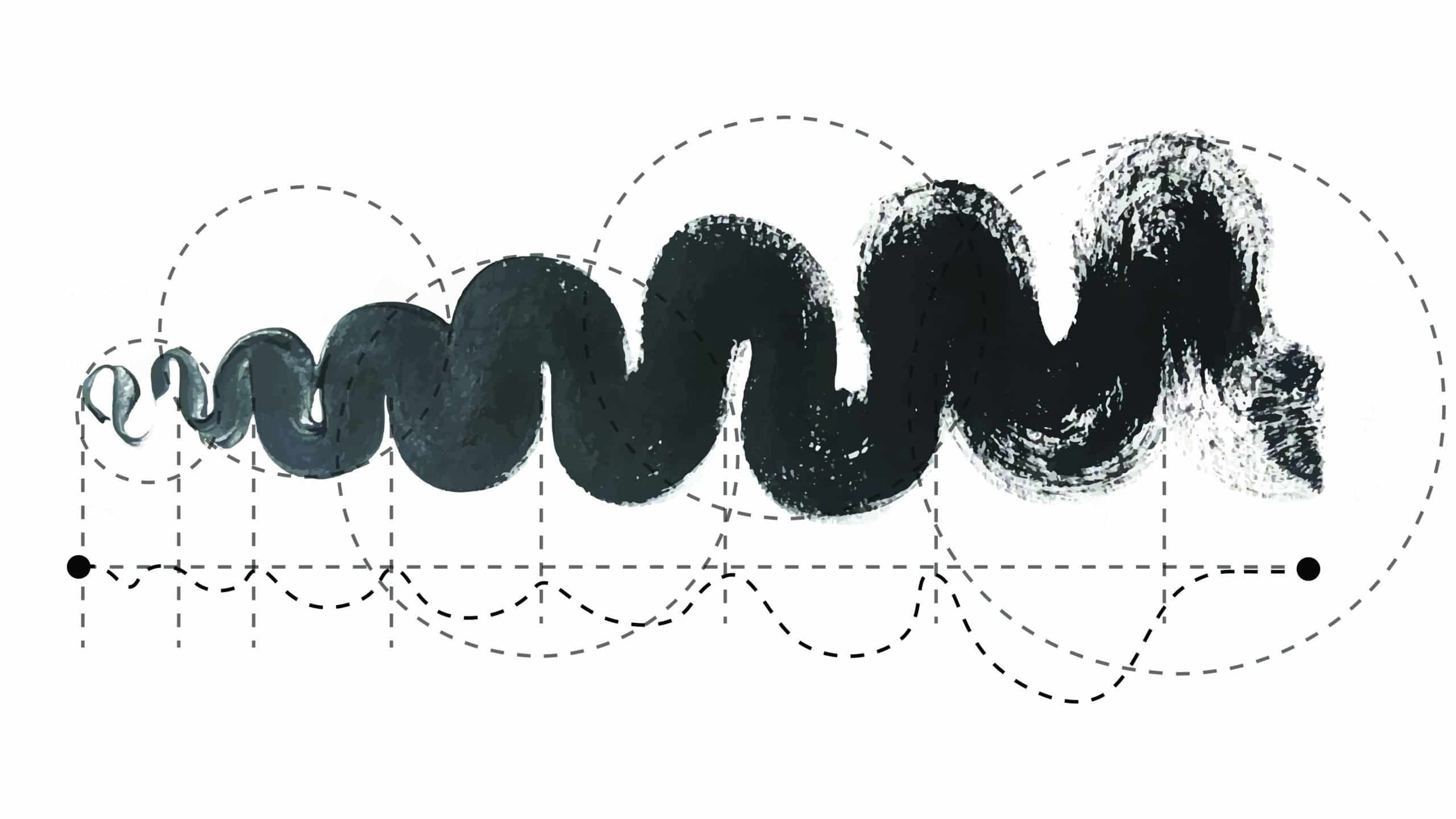
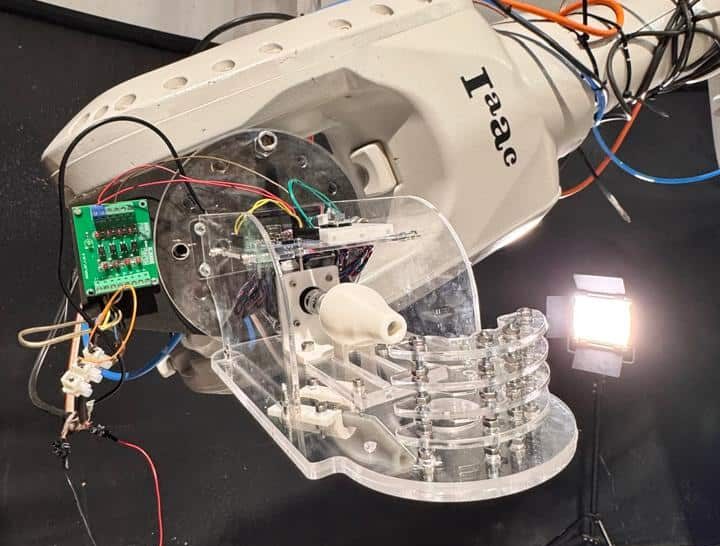
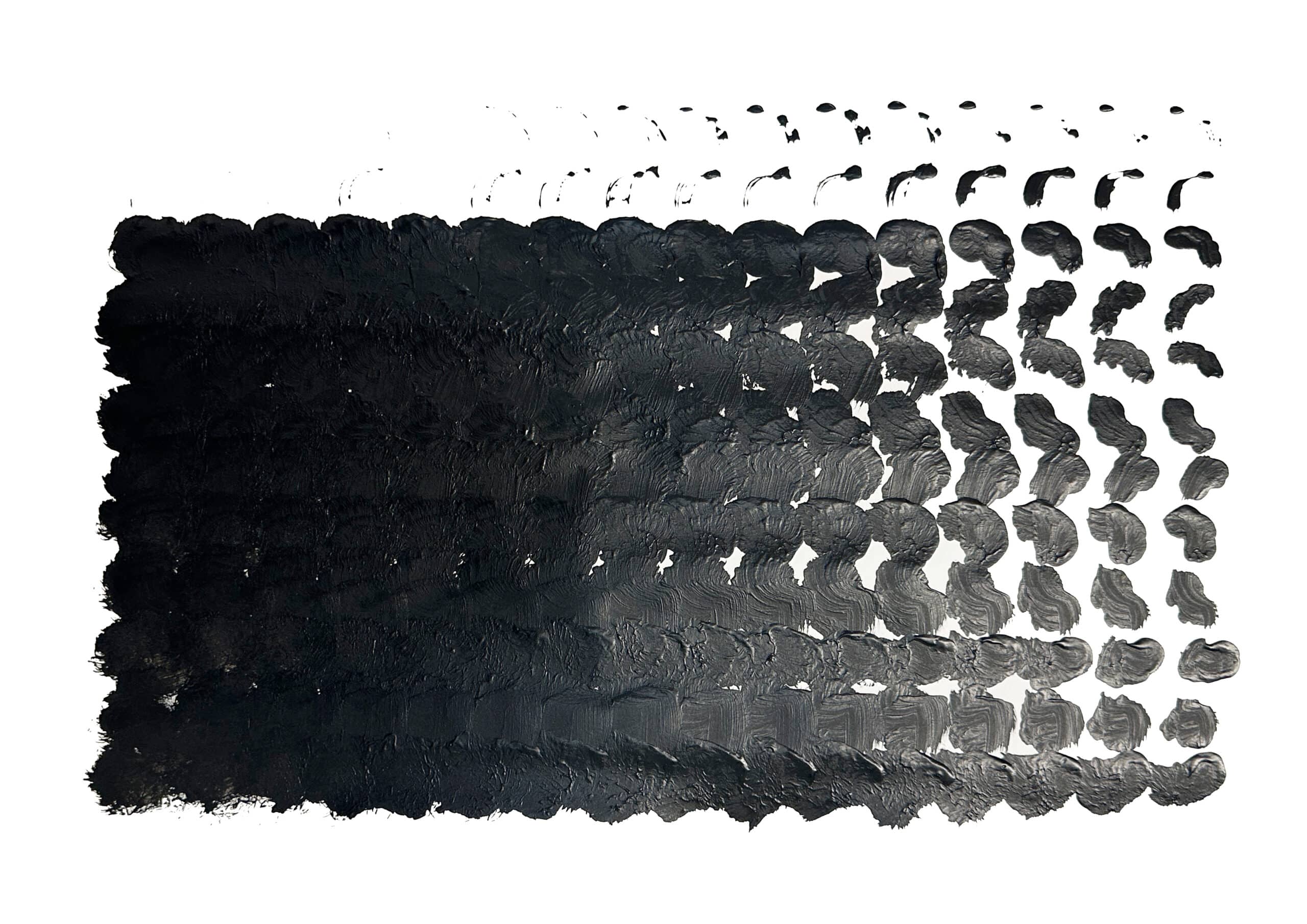
INTRODUCTION The first assignment of Anatomy of a Machine investigates how a robotic system can produce a brushstroke, an action typically associated with human intuition, variability, and continuous motion. Rather than beginning with predefined toolpaths or digital control, the project starts by reframing the human hand as a machine. Through a series of analog drawing … Read more