
The Master Programme in Robotics and Advanced Construction is an innovative educational format that offers interdisciplinary skills and understanding through a series of class seminars that are put into practice through hands-on workshops. IAAC gives students the opportunity to create individual studio agendas and develop Pilot Thesis Projects based on the knowledge acquired during the seminars and workshops split into 3 Modules. In this way, IAAC puts together an experimental learning environment for the training of professionals with both theoretical and practical responses to the increasing complexity of the construction sector.
NOT_Tiles
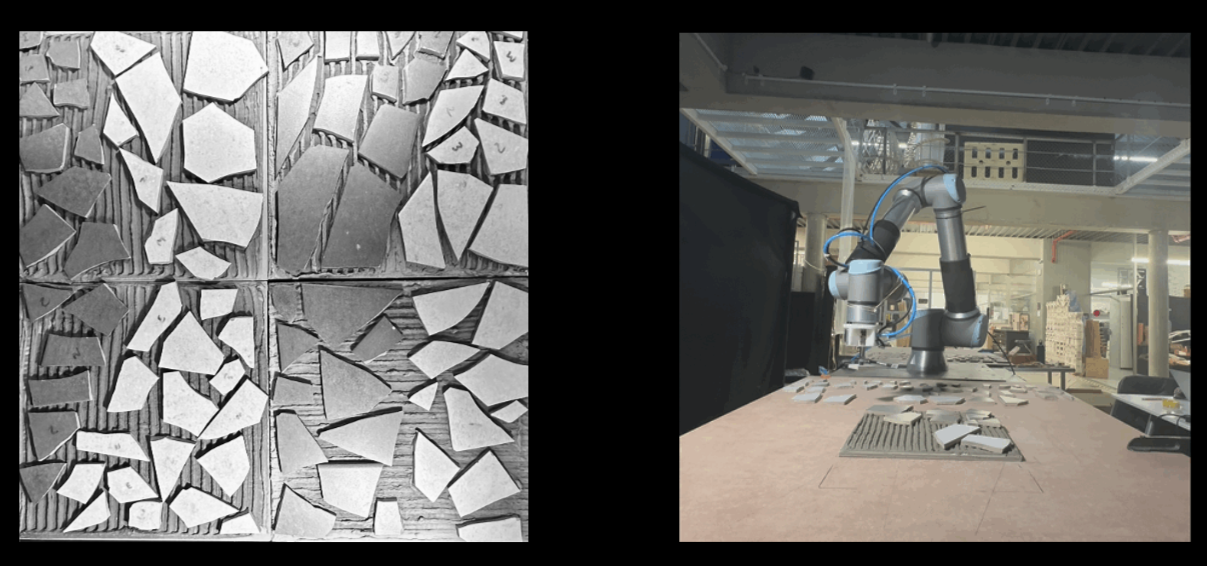
AIM \\ Create a design logic that would enable artists and mosaic makers to create unique, one of a kind and highly complex mosaic patterns by giving a second life to broken tiles; having full control of the overall geometry pattern and manufacture of each individual tile through computational technologies and mass production robotic strategies. … Read more
RoboMosaic

MRAC Workshop 2.2 Introduction We know that trash is a problem, specifically with respect to construction and demolition waste. The saying is supposed to go, ‘One man’s trash is another’s treasure.’ but at the moment we are missing the processes to intervene in the massive flows of construction and demolition wasted that are sent to … Read more
Perfectly Imperfect
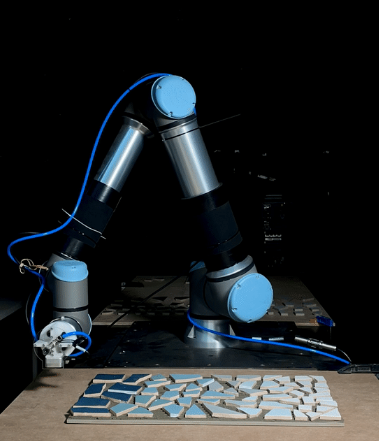
A story of mosaic leftovers and their robotic revitalization In alignment with the circular economy and Barcelona’s climate action plan of 2030, we want to use broken ceramic tiles from the demolition site for large-scale applications. It offers numerous benefits, including cost savings, environmental sustainability, mass-customization, and increased efficiency. The goal of the workshop is the … Read more
Spidey Sensor
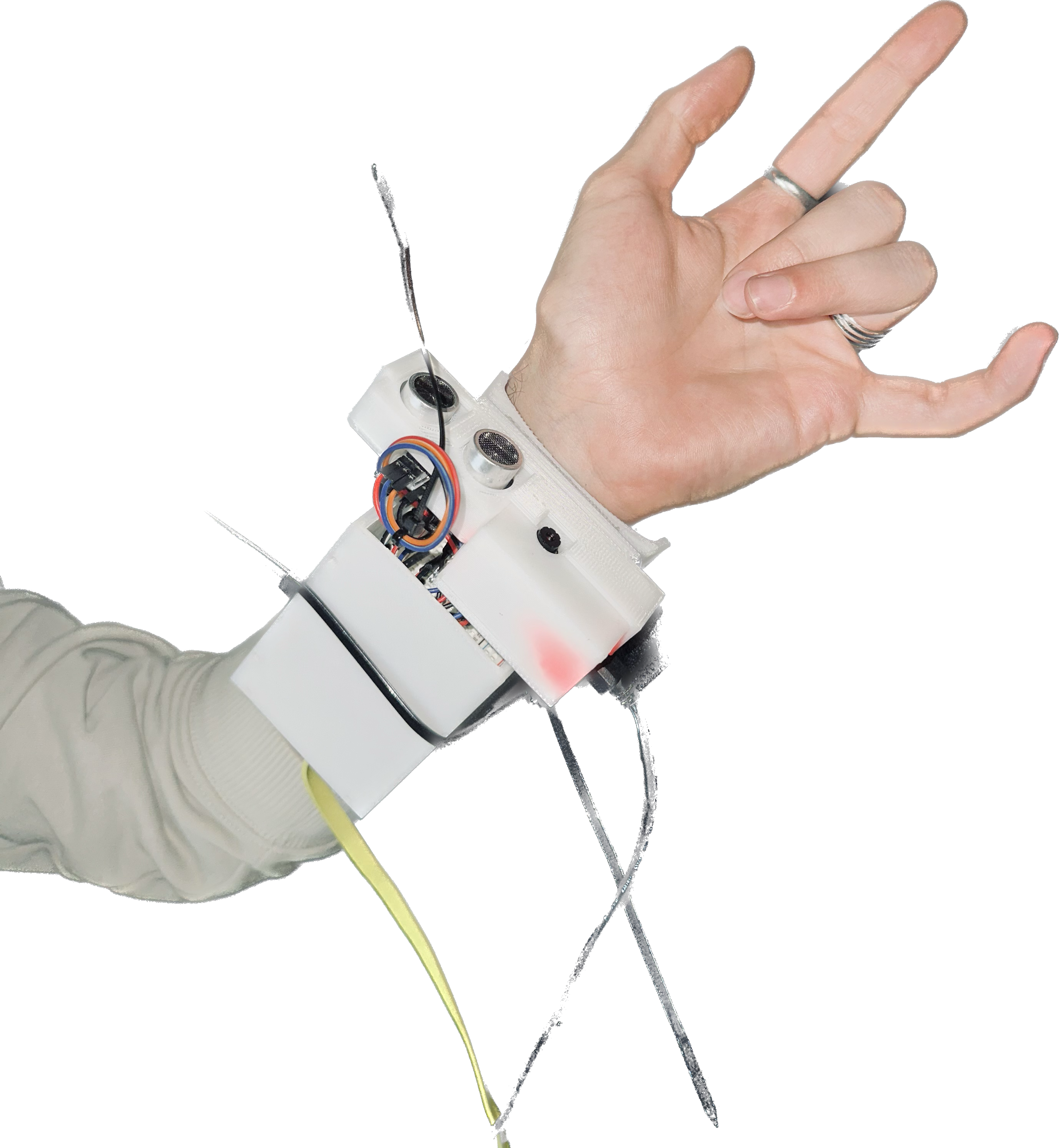
During this Hardware seminar, we were able to understand different types of sensors used in robotics and the techniques used to process the collected data. The aim of the seminar is to use the sensors to understand the environment and then expect the robot to take decisions (automation) and carry a specific task (actuation). For … Read more
Thermal Rhythm

An interactive art installation that utilizes thermal imaging and real-time animation to create a captivating visual experience. The general aim of the project “Thermal Rhythm” was to generate an interactive art-wall in complete darkness which translates the human body movements into animations that controls or visualizes the emotions of the detected person through different colors … Read more
From Scans to Mesh: Exploring ROS and MoveIt
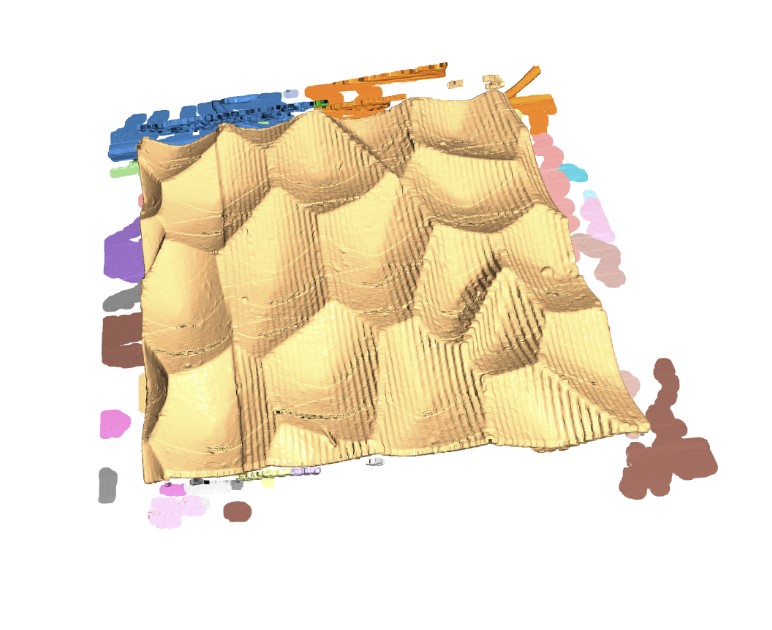
During the seminar, we explored the core concepts of ROS (Robotic Operating System), its vital tools, and the seamless integration of Python for interacting with robots. With this integration, we effortlessly processed sensor data and exercised control over the UR10e robot, which served as our platform for the seminar. Through practical exercises, we gained hands-on … Read more
ARUCO MARKER GUIDED AUTONOMOUS ROVERS
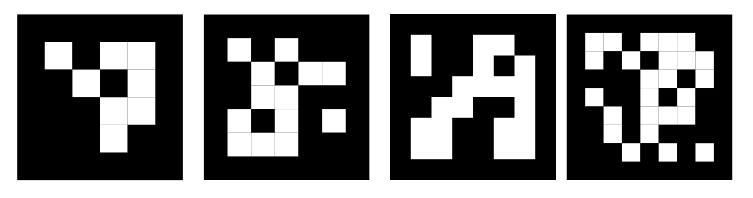
Aim Fiducial Markers Aruco fiducial markers were used for object detection and localization. Fiducial markers are black and white markers that can be detected and identified by computer vision algorithms, making them useful in a variety of applications. Here are some of the benefits of using Aruco fiducial markers: Localization & Mapping Workflow Node Graph … Read more
RTAOD

real-time autonomous object detection The project “RTAOD” in the workshop 2.1 was developed to navigate and localize a robot autonomously through room and create a map of the scanned area. In the meantime it collects data of detected objects and counts the quantity of them. Required tools This project got realized by the Software “ROS … Read more
Object of My Affection
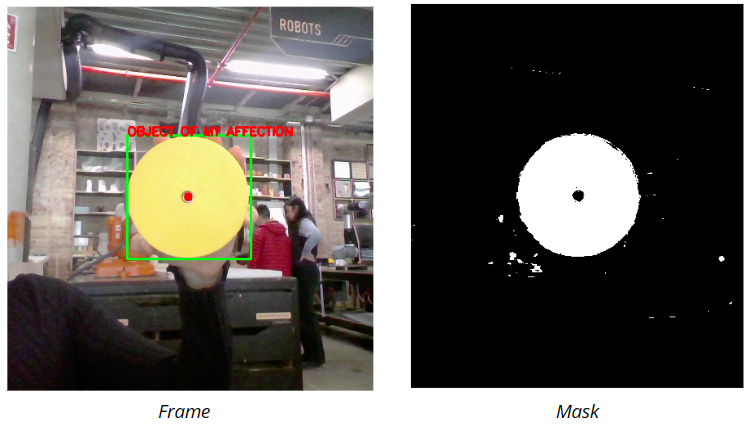
We programmed a turtlebot to identify and follow (at a respectful distance) the object of its affection: a simple yellow disk. We used the following in our project: Hardware Software Using Simultaneous Localization and Mapping To complete the process, a ROS node subscribed to the image topic being published that contained video from the Astra … Read more
Scanning to compare clay bricks: Digital vs Real
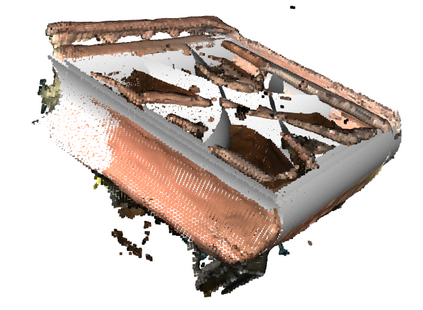
In this course we learned about the Robotic Operating System (ROS) and the MoveIt motion planning using Python for controlling robots. We also utilized development tools such as Git and Docker for managing the data. We learned about different types of sensors which helped for the robot’s motion visualization and scanning for the purpose of … Read more
Robotic Manufacturing of Cork Surfaces

The objective of this studio was to implement an automated robotic process for the efficient fabrication of modular cork blocks, essential components of a doubly curved acoustic surface. The key objectives encompassed the following: By addressing these objectives, the studio aimed to advance the field of robotic fabrication while emphasizing the acoustic potential of cork … Read more
Ruled Stereotomic Manufacturing

Ruled surfaces are a way to address both simplicity in terms of design rules and at the same time complexity in terms of the outcome. In this workshop we aimed at defining design rules which are performance driven, to obtain modular geometries. Through parametrization and manipulation of computational workflows we generated paths and mapped them … Read more
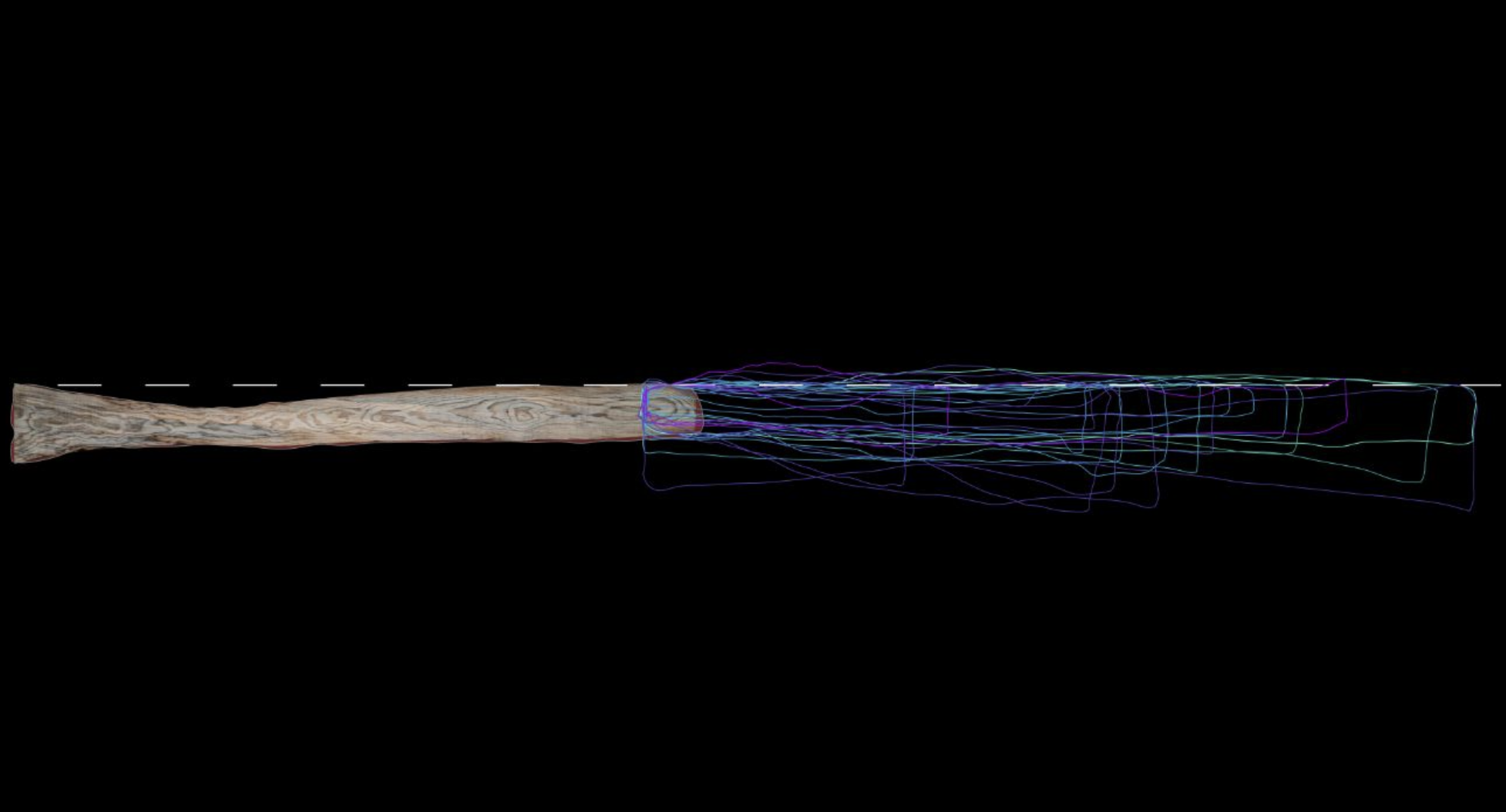
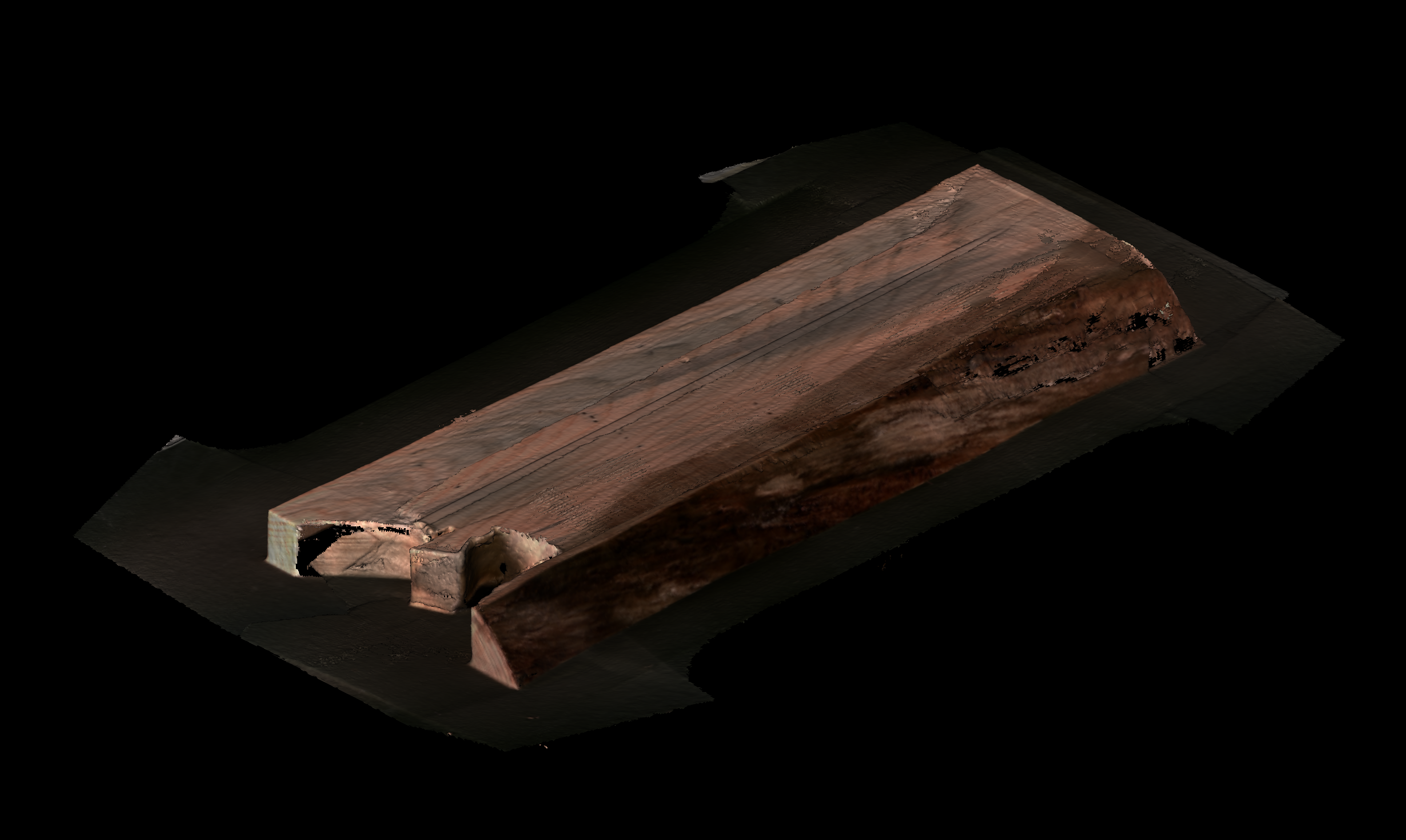
re(al)form

Wood is a naturally grown material that is often seen by industry as a linear and standardized entity. “re(al)form” focuses on the resulting leftovers, which take the naturally grown form language of wood from nature to create an aesthetic and seamless facade which takes the fiber direction as a main input. The project embodies aesthetic … Read more
Stapler of Art

A Stapler Gun End Effector Description The project aims to deal with art in new different techniques that keeps up with the technology by getting the best of the robotic arm in a way to create staple art pieces that can achieve new ways of art depending on the robots. The main idea evolved around … Read more
