
The Master in Robotics and Advanced Construction (MRAC) seeks to train a new generation of interdisciplinary professionals who are capable of facing our growing need for a more sustainable and optimised construction ecosystem. The Master is focused on the emerging design and market opportunities arising from novel robotic and advanced manufacturing systems.
Through a mixture of seminars, workshops, and studio projects, the master programme challenges the traditional processes in the Construction Sector. It investigates how advances in robotics and digital fabrication tools change the way we build and develop processes and design tools for such new production methods.
TerraWeave: Startup Pitch

The Problem The built environment is responsible for 42% of annual global CO₂ emissions. Within this, building operations and construction alone contribute nearly one-third. Yet, current construction methods lack flexibility, efficient resource use, and environmentally friendly solutions. This is the context that drove our project. Terraweave Solution TerraWeave integrates robotics, wattle and daub construction and … Read more
Re-Skin-2
EU generate 25-30% of all waste from construction and demolition (C&D) activities, much of which remains underutilized or sent to landfills. Context whilst global temperatures are rising towards +4°c, building facades are a main contributors to the urban heat island effect within cities.2050 about 70 % of the world’s population will live in cities.The building … Read more

Studio II_Anatomy of a System: RE_SHAPE

Introduction In a world where natural resources are increasingly scarce, the construction industry faces a crucial challenge: reducing material waste and maximizing the use of available resources. Wood, a traditionally used construction material, is at the center of this issue. Every year, millions of tons of wood are discarded or underutilized due to its irregular … Read more
Reinforcement Learning for Robot Obstacle Avoidance
adapted from IaaC´s Artificial Intelligence Program’s study of machine learning for robotic pick and place. (https://blog.iaac.net/reinforcement-learning-for-robotic-pick-and-place/research). Github Repository. https://github.com/LaurenD66/ROS-GridWorld-RL-with-Obstacles In a recent study by IaaC´s Artificial Intelligence Program, students used reinforcement learning models to train an (robotic) agent to move through a space defined by a simple grid from an origin to a goal, while … Read more
Robotic Fabrication of Friction Based Timber Joinery
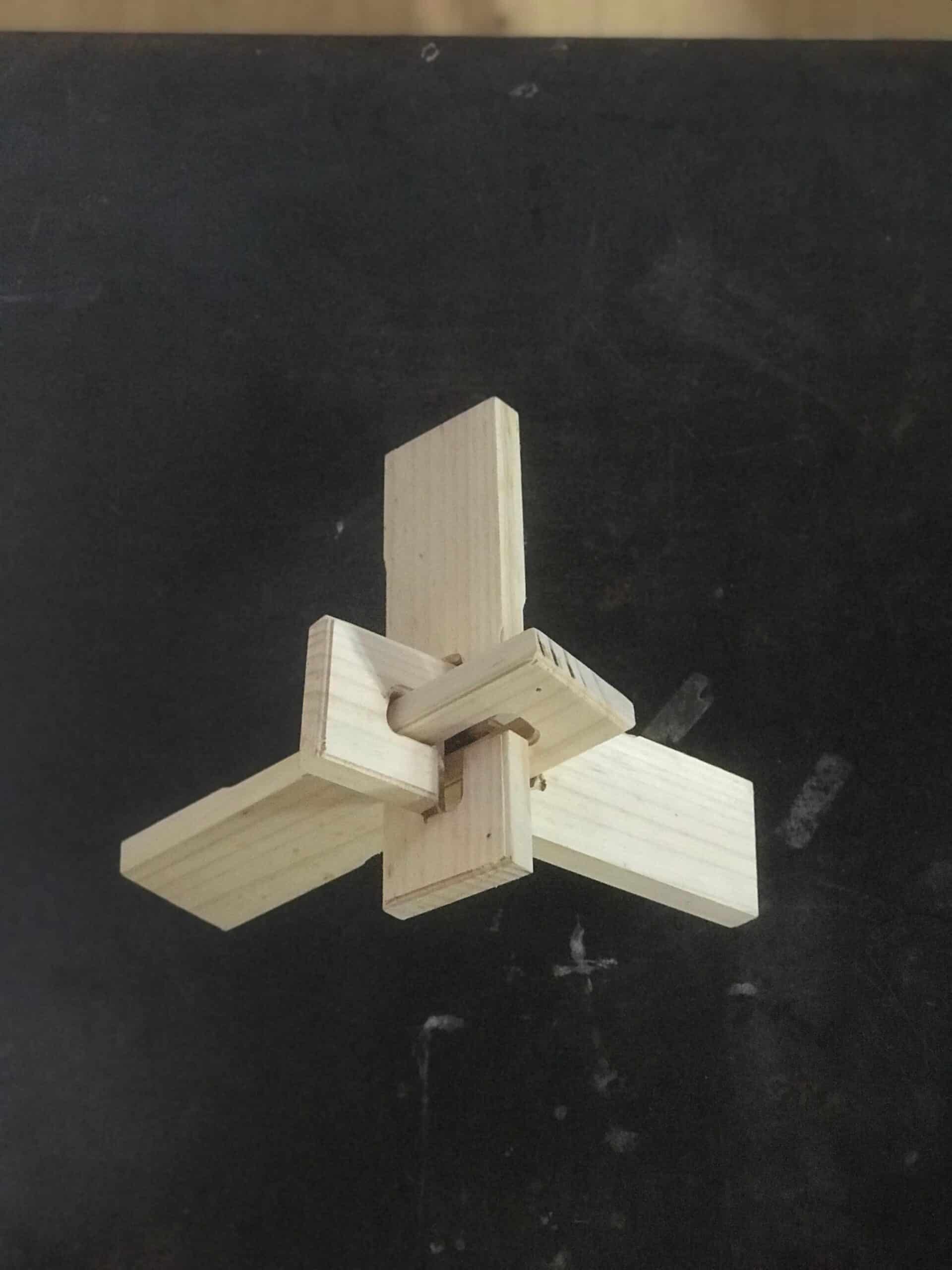
Robotic Fabrication of Friction-Based Timber Joinery: Burr Puzzle Assembly This research explores robotic assembly of friction-based interlocking timber joints using the burr puzzle as a case study. The puzzle’s tight tolerances and sequential assembly pose challenges. Through modeling and robotic execution, the study shows that while a single-robot approach is feasible, dual robots are necessary … Read more
Clay Spatial Printing II (Sensing for Detection)
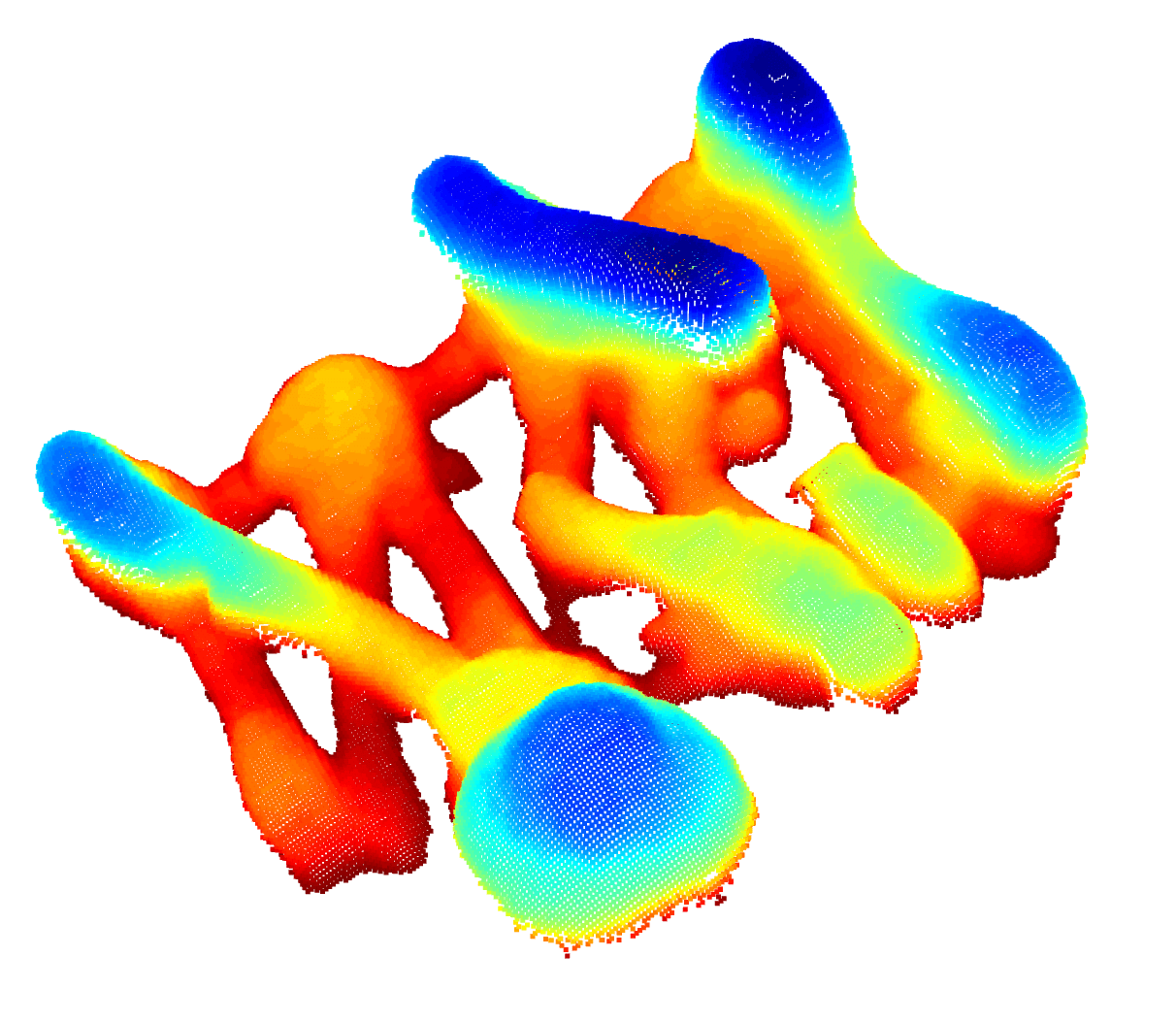
Workflow for Detection (Transformation to the Real World) Test for getting the points in real world Workflow for Detection (Getting points into the Trajectory) Test for getting the points in real world Workflow for Detection (Processing on Point Cloud) Test for getting the points in real world Machina Connection for ABB_6700 (Simulation)
Cacau II

For this term experiments and tests were conducted for the evaluation markers of the biocomposite of PLA with different charges of Cacau Seed Shell and the Fabrication performances of each biocomposite charges. Tests on mechanical perfomances such as Tensile Strenght, Flexural Stress and Izod Impact were conducted. Compostability tests were also setup in the range … Read more
ReLeaf – Term II
Aerial Reforestation Using Autonomous Drones Desertification threatens 74% of Spain’s land, worsened by deforestation and wildfires. To aid reforestation, this project develops an open-source drone for autonomous terrain analysis and seed dispersal. Using the Holybro X500 V2, it integrates SLAM for mapping and navigation. Initial work focused on hardware setup and autonomous flight. Future steps … Read more
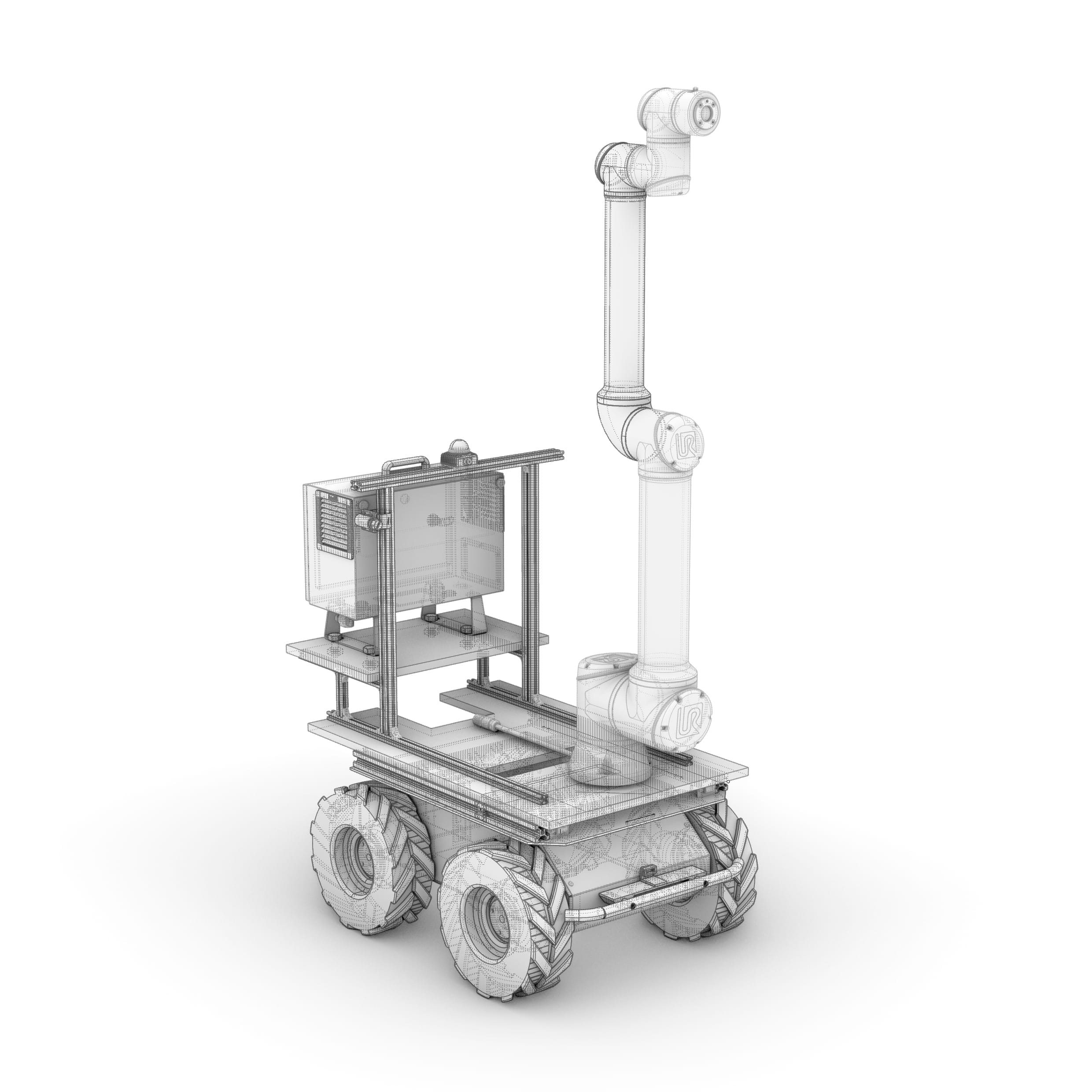
HUSKY + UR
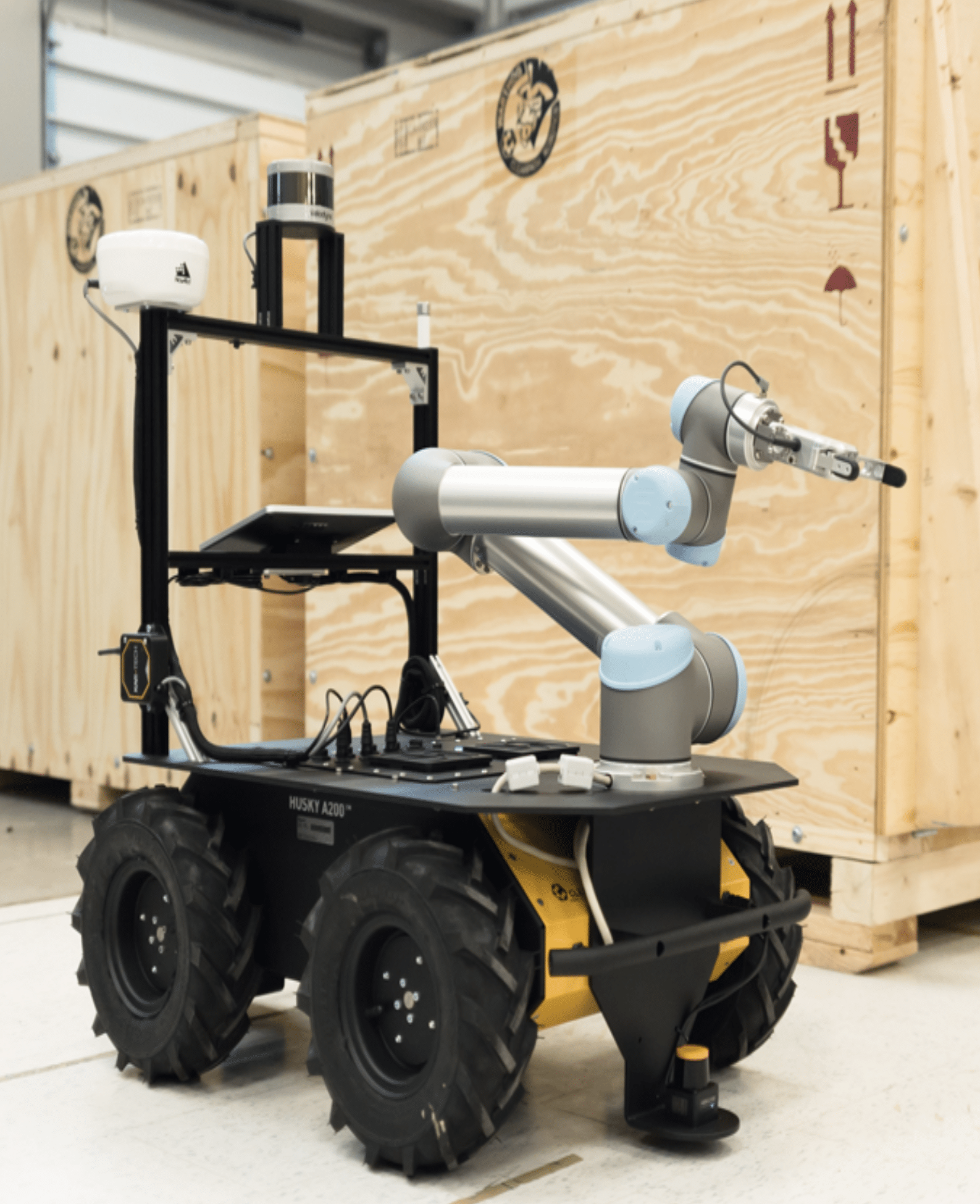
AIM The goal is to teleoperate both the Husky robot and the UR10e arm, enabling them to avoid obstacles on the floor and push those that are unavoidable. To achieve this, we designed a system that allows the user to control both robots using any available camera, incorporating hand tracking for intuitive command execution. SYSTEM … Read more
Spatial Cognition in Robotics: Optimizing Construction Workflow with AI
Sticks & Stones
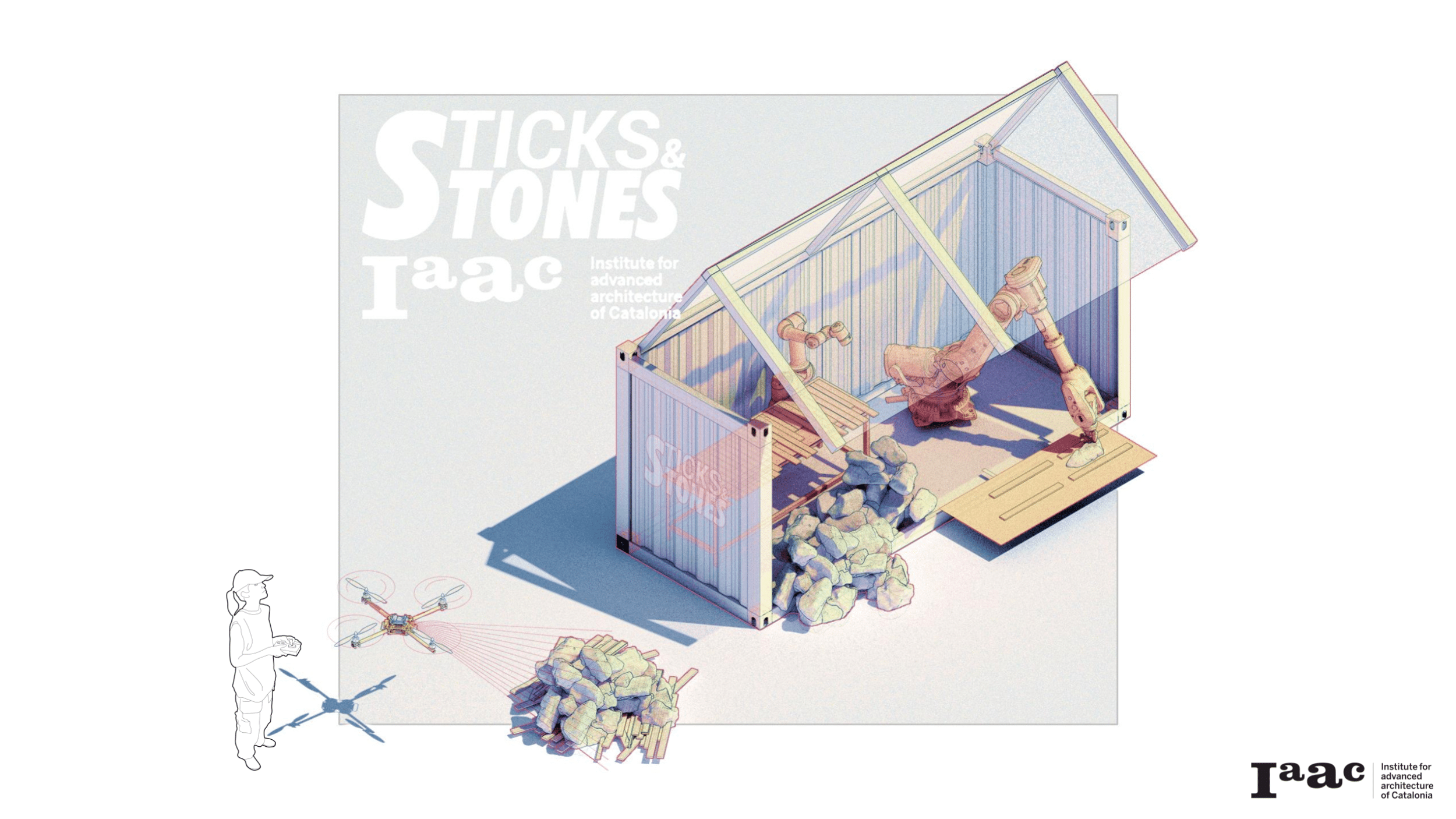
As businesses evolve in the 21st century, success is no longer measured by profit alone. Today, organizations are expected to create meaningful value for people, the planet, and the broader economy. The Sustainable Business Canvas is a strategic tool that helps businesses embed sustainability at the core of their operations by assessing not just economic … Read more
RE_SHAPE
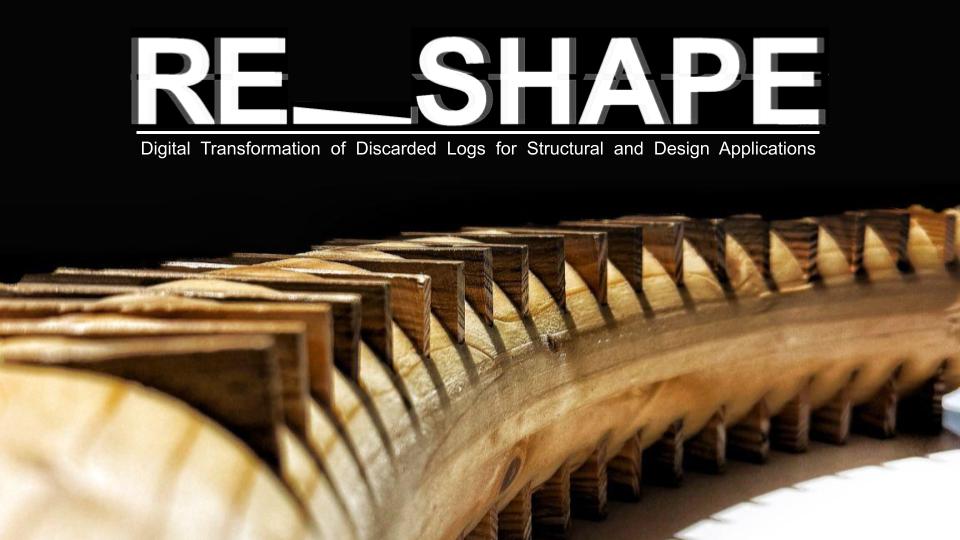
Digital Transformation of Discarded Logs for Structural and Design Applications Re_Shape is a design and innovation project that addresses a major blind spot in the forestry industry: the waste of tree trunks that are curved, bifurcated, or otherwise irregular and therefore excluded from traditional processing systems. These logs are typically downgraded into low-value products like … Read more
Robotics Solutions for Building Anomaly Detection
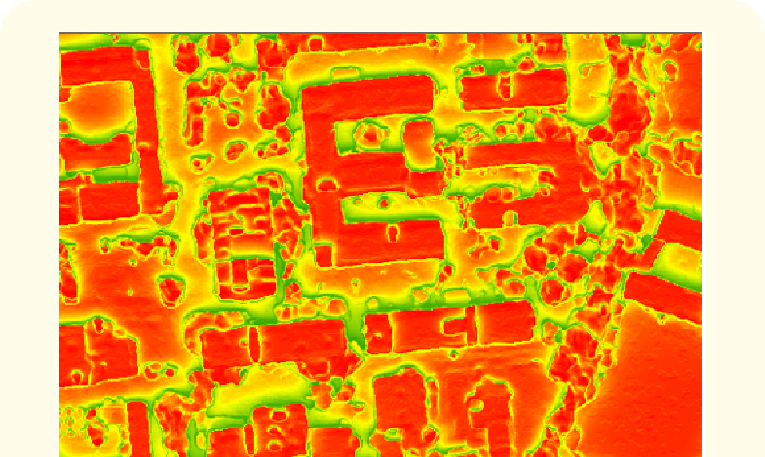
Introduction In the face of increasing climate-related disasters, accurate and efficient scanning methods are essential for assessing structural integrity. Our team developed a robotic scanning solution that utilizes LiDAR-based Husky A200 and drone photogrammetry to detect roof anomalies, such as holes and structural weaknesses.This study explores different scanning methodologies and evaluates their effectiveness in detecting … Read more
Smart Waste Management
Mobile Robotic Scanning & Discrete Element Analysis This workshop served as an introduction to mobile robotics for scanning. We explored various types of mobile robots and different kinds of sensors, focusing on how they integrate with one another to enable diverse scanning approaches. Based on these investigations, we designed a specific scanning methodology suited to … Read more
