
The Master in Robotics and Advanced Construction (MRAC) seeks to train a new generation of interdisciplinary professionals who are capable of facing our growing need for a more sustainable and optimised construction ecosystem. The Master is focused on the emerging design and market opportunities arising from novel robotic and advanced manufacturing systems.
Through a mixture of seminars, workshops, and studio projects, the master programme challenges the traditional processes in the Construction Sector. It investigates how advances in robotics and digital fabrication tools change the way we build and develop processes and design tools for such new production methods.

Applied Theory III _ Un_Log Factory
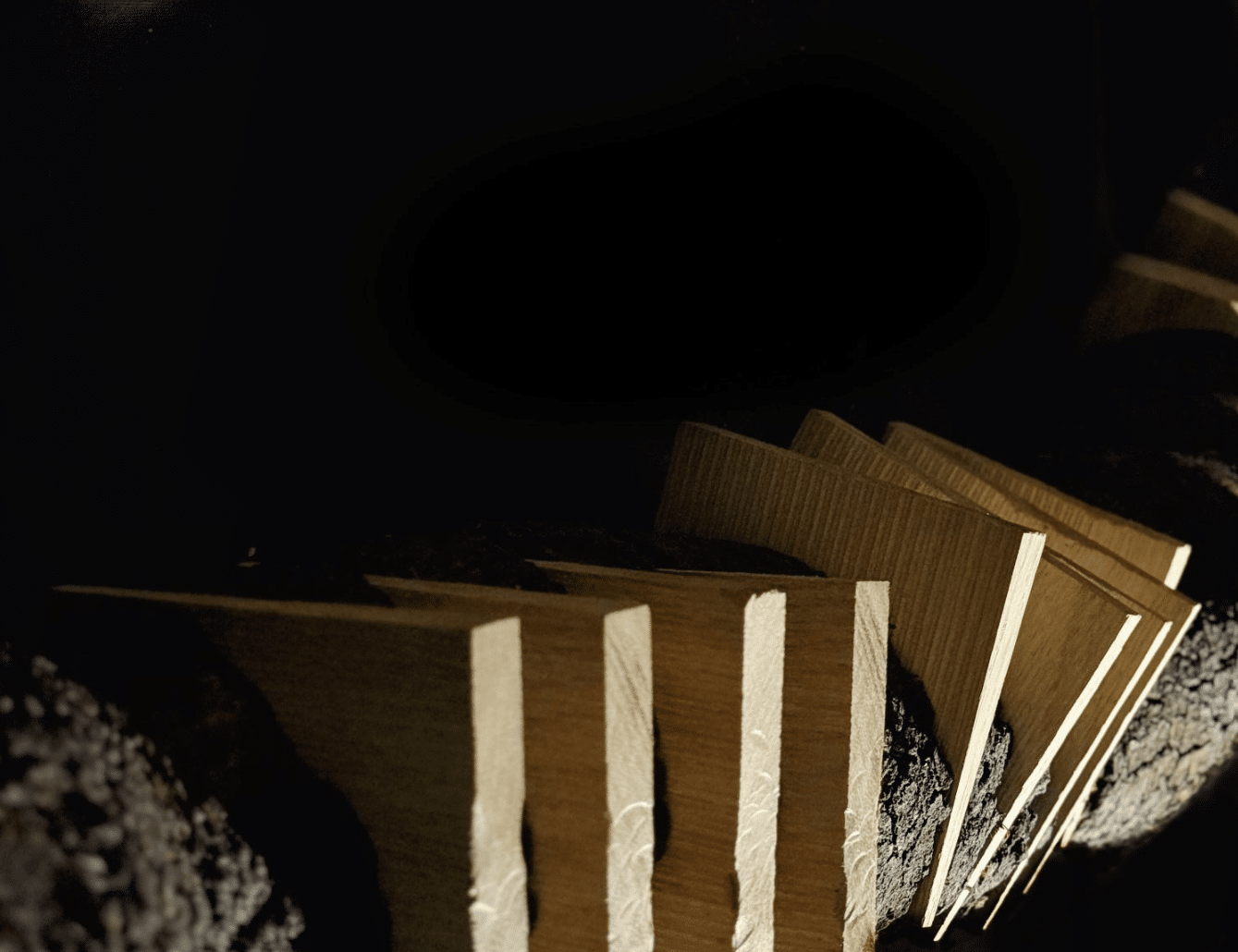
INTRODUCTION In today’s construction industry, a large portion of timber is discarded due to its non-standard shape, curvature, or internal defects. Un_Log Factory challenges this paradigm by proposing a digitally augmented fabrication system that embraces the natural irregularity of timber. Instead of seeing bent or cracked logs as waste, our process redefines them as raw … Read more
Rock the Rock
A Real-Time Audio-Visual Stone Symphony Rock the Rock is an interactive audio-visual installation that identifies and tracks rocks in real time, generating dynamic sound and projection overlays. By leveraging computer vision and finite state machines, it transforms geological forms into a sensory experience. Concept and Context This project served as our introduction to Finite State … Read more
PalmPilot 2000

No mouse. No keyboard. Just you. Github Link: https://github.com/Adronegenius/palmpilot2000.git Problem/Opportunity Current 2D CAD layout tools rely heavily on complex UI layers and precise mouse manipulation. These become barriers for: PalmPilot2000 addresses this by introducing a body-centered interaction system, where gestures drive the logic of selecting, moving, and placing elements on a plan — with visual … Read more
Potato Tower
Video: https://drive.google.com/file/d/1r3yyxQtWeZv6ADY_KyH7Zf4tiKYiu466/view?usp=sharing Github: https://github.com/sashakraeva/potatotower
Hardware III _ LEGO_GUIDE
Github : https://github.com/Clarrainl/Lego_AR_Interface Introduction What if LEGO instructions could appear right on your table, adapting to the bricks you have?Lego_AR_Interface turns the simple act of LEGO building into a smart and interactive experience. Combining computer vision, real-time projection, and gesture recognition, the system guides users through constructing custom models—no screen touches required. Concept: Build from Random Bricks … Read more
Machine Learning Strategies for Toolpath Optimization in Fabrication
In the ongoing pursuit of efficient toolpath generation, we set out to build a modular, logic-driven system capable of planning subtractive manufacturing strategies. The framework integrated zonal segmentation, directional movement, and dynamic state awareness; its goal was adaptability and long-term scalability. While we achieved full system functionality, this initial iteration exposed the distance between a … Read more
KAPLA KADABRA
XX WS3.1 XX How can we compress the soul of a 3D object into a few pixels?Kapla Kadabra explores the magic of encoding geometry into 2D data structures – and bringing it back to life. XXXXXXXXXXXX AIM XXXXXXXXXXXX This project explores a lightweight method to encode and decode 3D geometries into pixel matrices. Instead of … Read more
Interlock Tower

Rethinking Towe Typology with AI: This project explores the redesign of contemporary tower structures using machine learning (ML), challenging the repetitive, profit-driven design seen in cities like Hong Kong. The goal is to discover new typologies through AI and stacking rules, and tren translate them to a robotic fabrication system (pick and place). AI-generated towers … Read more
Workshop 3.1_KAPLA-Nest

| INTRODUCTION | Learning Structures: From Parametric Rules to Machine-Made Forms. In this project, we explored the interplay between parametric design, machine learning, and robotic fabrication. Starting from Kapla block assemblies controlled by simple deformation rules, we trained a GAN to reinterpret and generate new structural variations. The process concluded with robotic pick-and-place construction, closing … Read more
Software III : 3D-Printing Prediction System with Machine Learning.
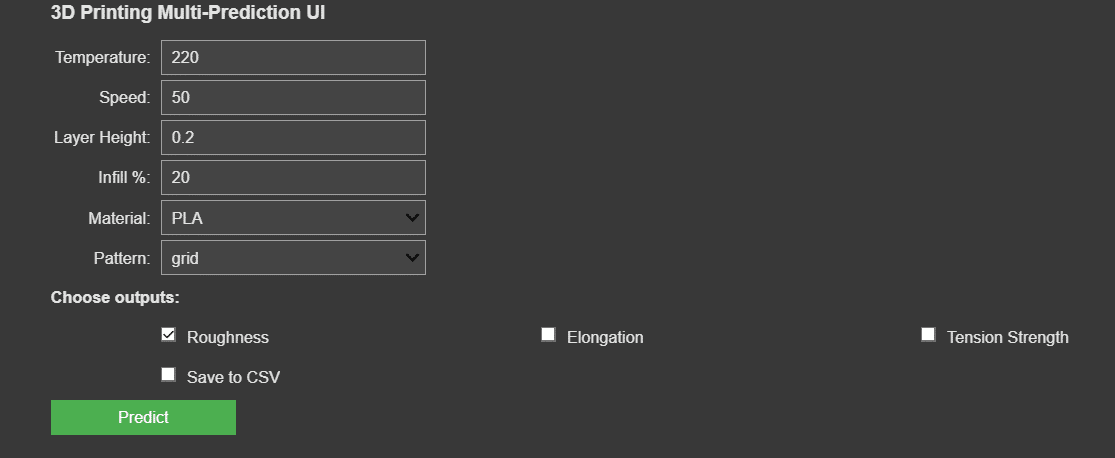
[ 1 ] FIRST QUESTIONS : The application of Machine Learning (ML) to the prediction of 3D printing parameters presents a challenge that necessitates a structured approach and raises many questions on how to approach this combination. To effectively explore this integration, it is essential to address three core questions: What are the process and the … Read more
Software III _ UN_LOG FACTORY

Github : https://github.com/Clarrainl/UN_LOG-Factory | INTRODUCTION | Detecting wood defects in 3D-scanned logs using Machine Learning In the timber industry, a significant portion of wood gets discarded due to irregularities or defects that make it unusable under standard practices. However, many of these logs can still be used creatively or structurally if properly understood and classified. This project … Read more
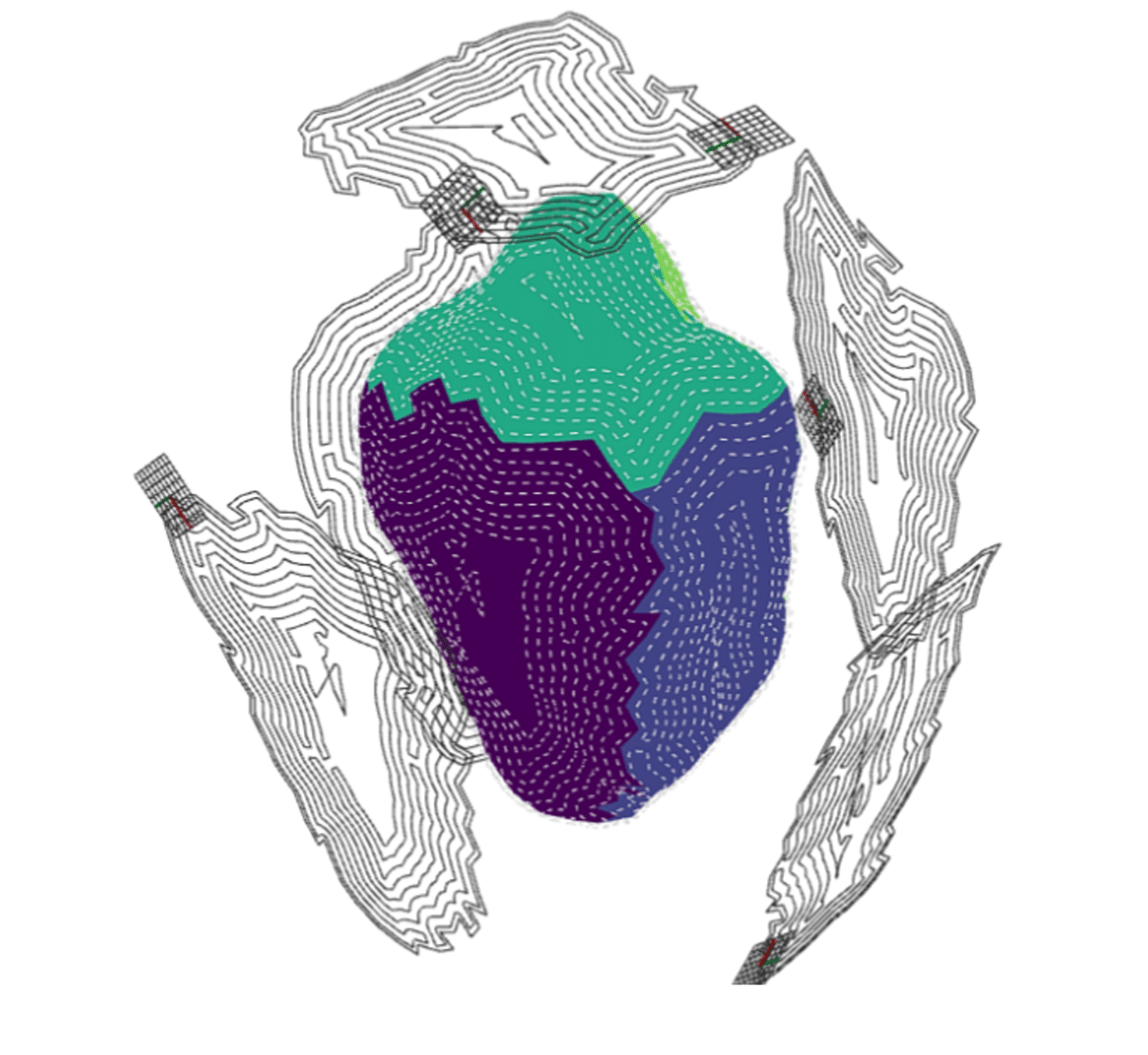
Software III: AI Optimized Earth Injection Deposits

Github: https://github.com/Adronegenius/Software-III-AI-Optimized-Earth-Injection-Deposits The process begins with human fabrication of woven modules using flexible rods or sticks. Due to tension, compression, and human variability, the woven pattern often deforms. Our system integrates computer vision to scan these deformations and a robotic arm to inject earth between structural members at optimized locations. This bridges physical craft and … Read more
Terraweave: Innovative Structures for a Changing World
Introduction In the face of the growing demand for sustainable construction, the integration of renewable materials with advanced fabrication techniques is essential for creating adaptable and efficient structures. Our team developed Terraweave, a project that combines willow and earth to create hybrid building components. By leveraging the natural properties of willow for flexibility and earth … Read more
Sticks & Stones: Precision in Robotic Fabrication with Traditional Materials

In an era dominated by concrete and steel, the Sticks & Stones project revisits the architectural potential of stone and timber—materials with a rich historical legacy—through the precision of robotic fabrication. This initiative sought to develop a reversible, precise architectural system that bridges traditional craftsmanship with advanced digital tools. By tackling the challenges of natural … Read more
