Studio I_Anatomy of a Machine: Shape
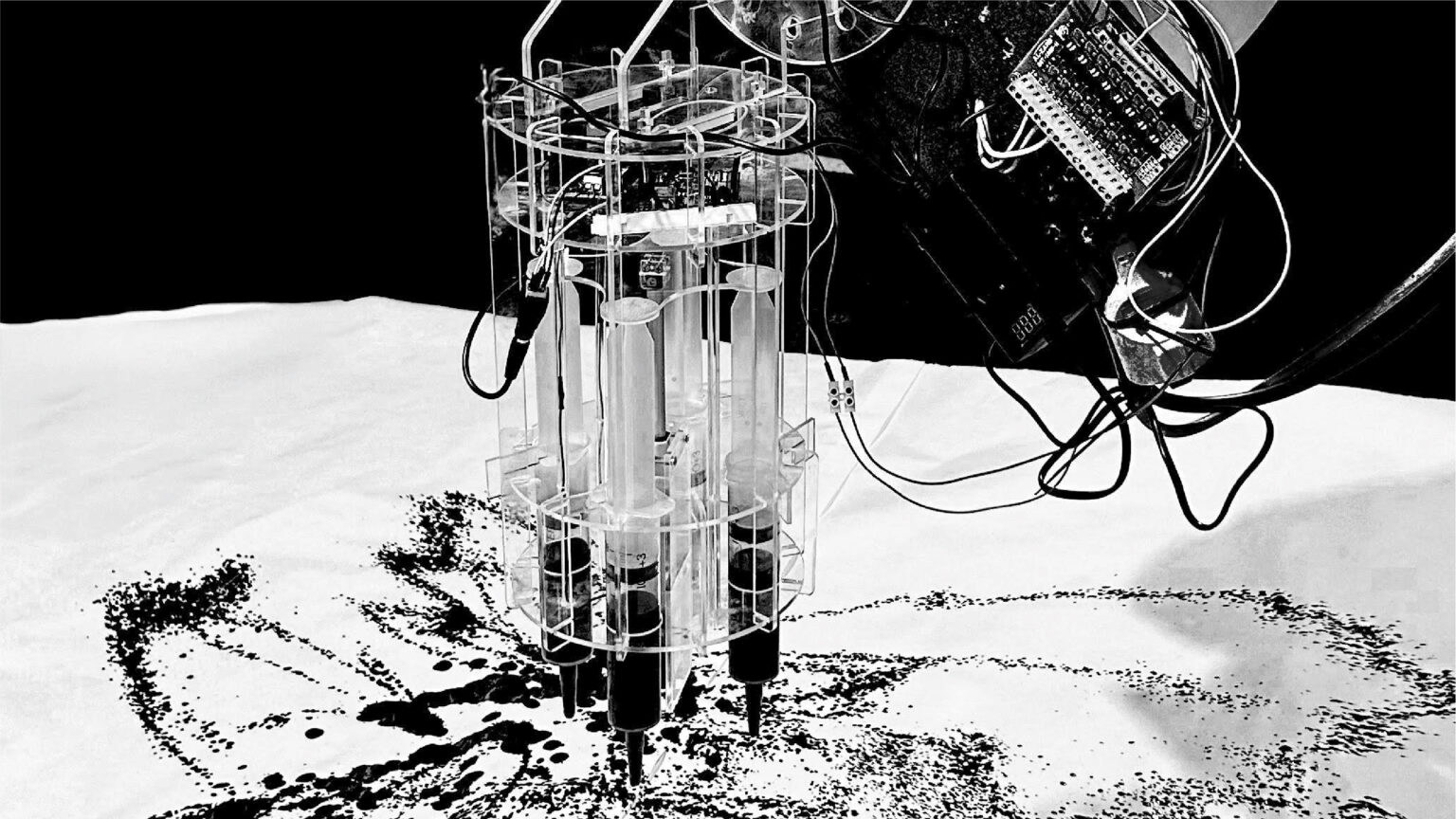
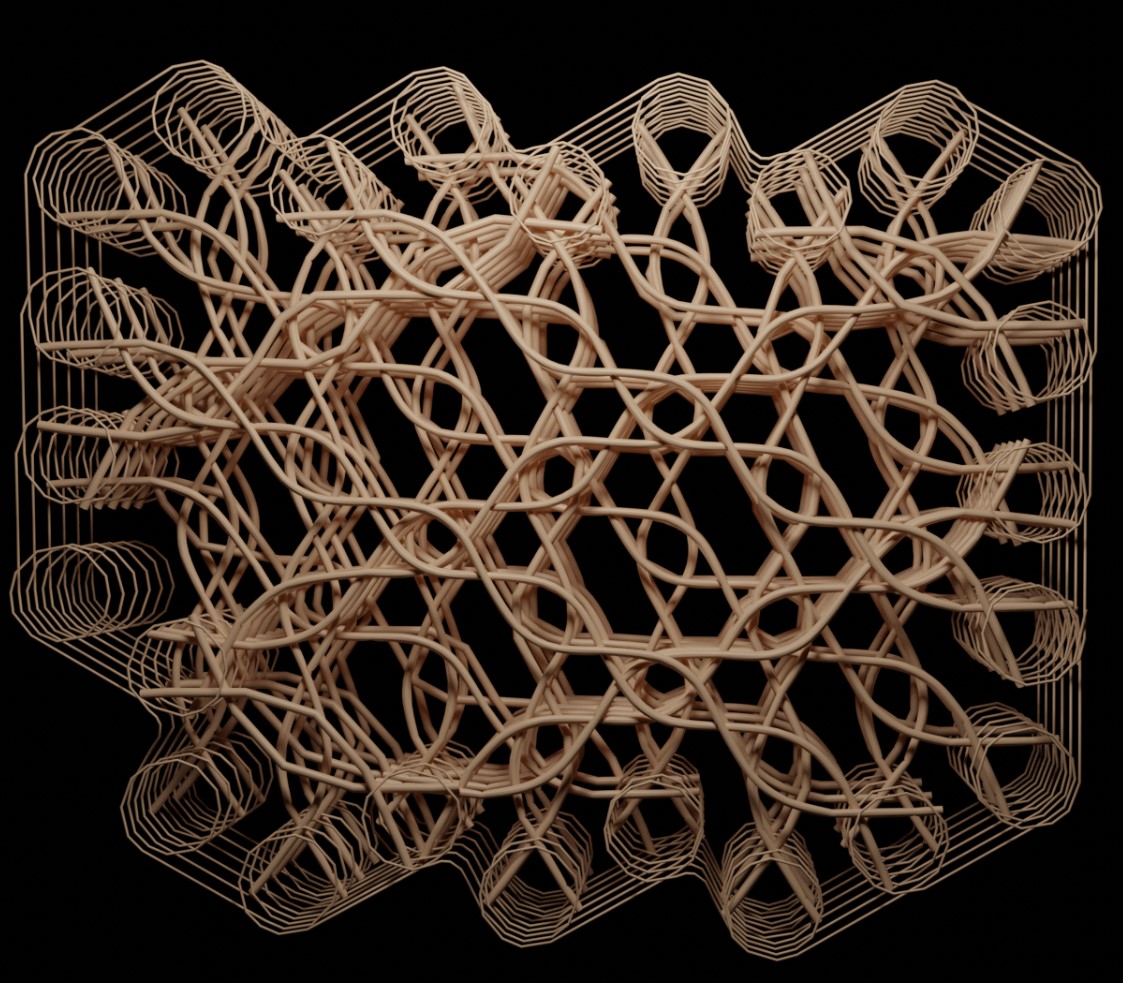
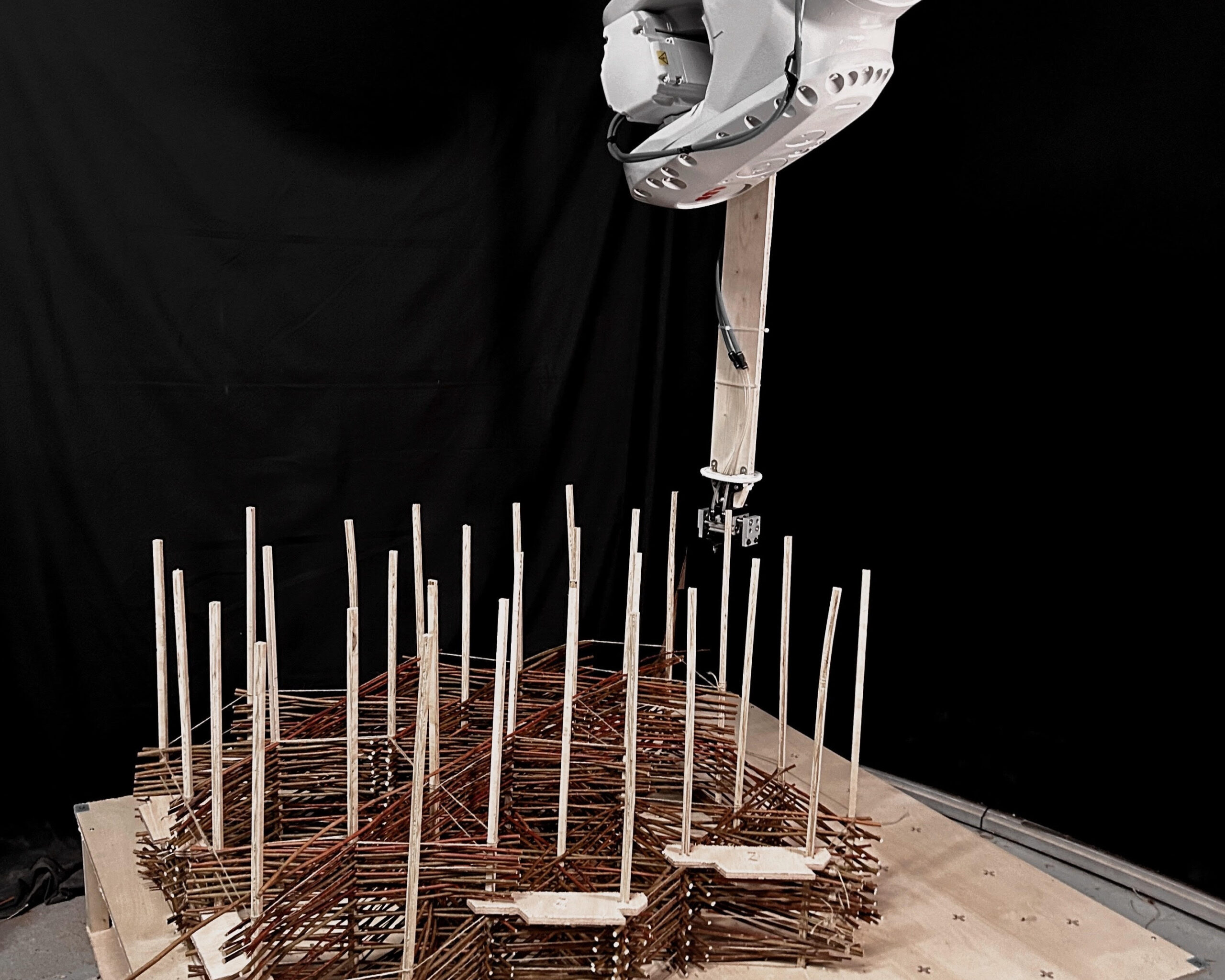
INTRO As part of the “Anatomy of a Machine – Shape” course, we engaged in an exercise that explores the possibilities of robotic material manipulation through various tools and techniques. Our objective was to research and experiment with sustainable, accessible, and locally available materials, applying scientific and creative principles to produce unique prototypes. This process … Read more