Robotics Solutions for Building Anomaly Detection
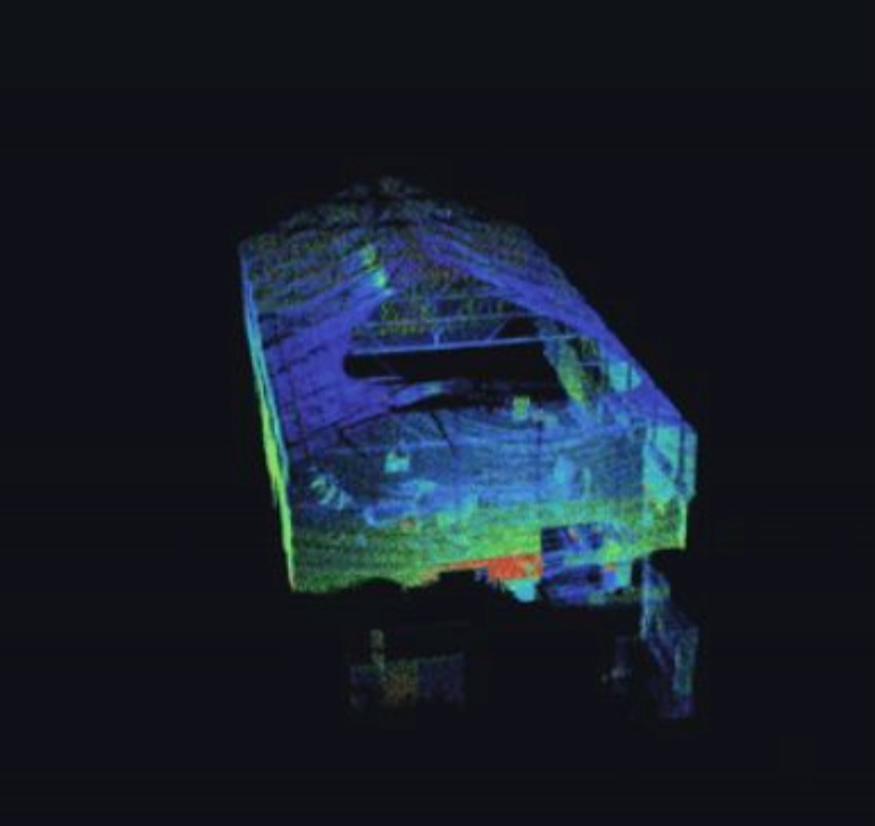
Introduction In the face of increasing climate-related disasters, accurate and efficient scanning methods are essential for assessing structural integrity. Our team developed a robotic scanning solution that utilizes LiDAR-based Husky A200 and drone photogrammetry to detect roof anomalies, such as holes and structural weaknesses.This study explores different scanning methodologies and evaluates their effectiveness in detecting … Read more